Hallo! Ich bin Klemm! Mit dem XWK-Bot wollen wir gemeinsam das spannende Gebiet der Robotik/Mechatronik entdecken!
Wir bauen gemeinsam einen fahrenden Roboter, den du einfach selbst programmieren kannst.
Mechatronik ist eine spannende Mischung aus Mechanik, Elektronik und Informatik
Zum Zusammenbau benötigst du folgendes Werkzeug:



Nicht unbedingt nötig, aber praktisch sind zusätzlich:





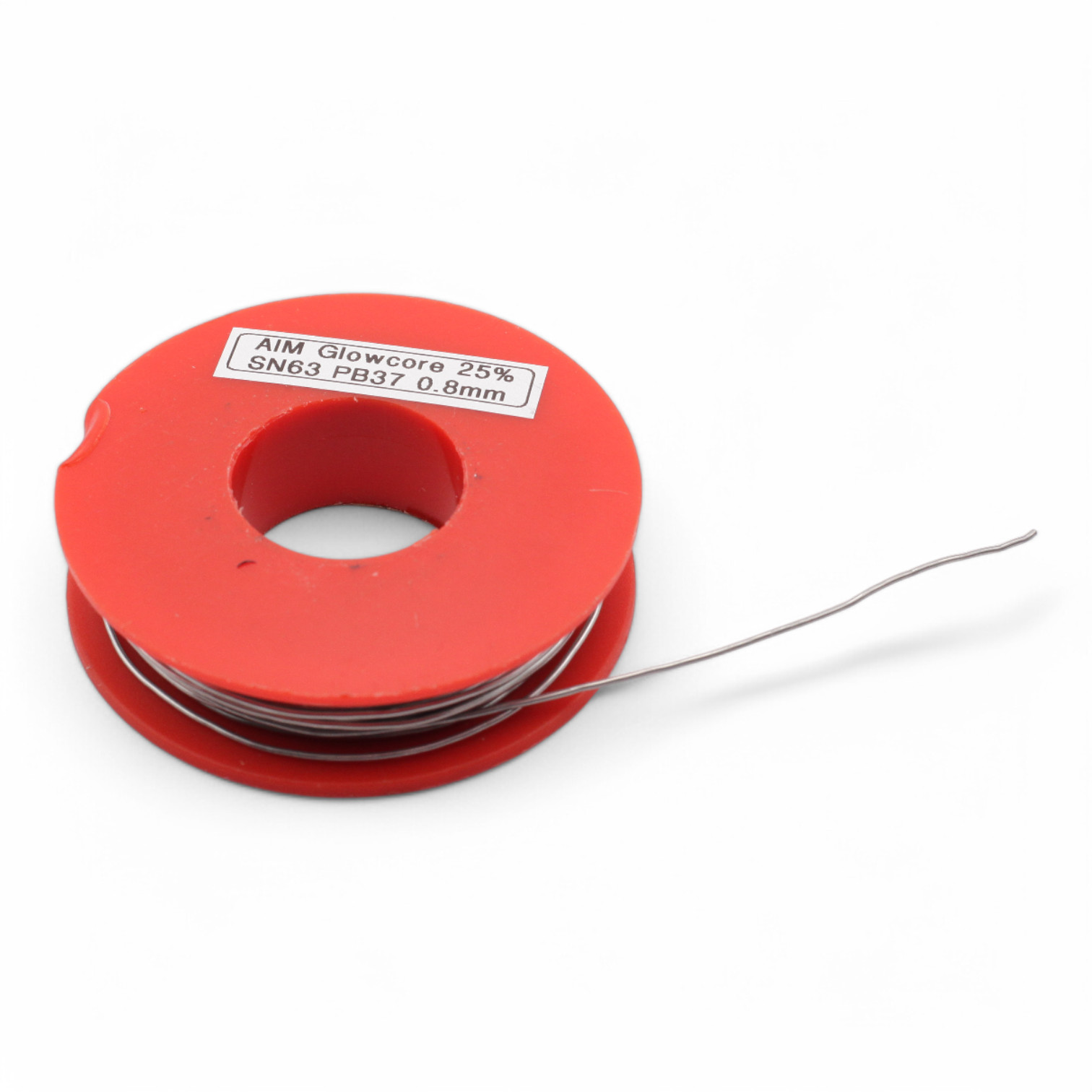
Du benötigst einen Lötkolben (am besten mit Spiralständer und nassem Schwämmchen) und Lötzinn. Wenn du die Temperatur einstellen kannst wähle 300°-350°. Warte 1-2 Minuten bis der Lötkolben heiß ist. Sei nicht traurig wenn es nicht gleich klappt, Löten ist Übungssache. Du schaffst das!
ACHTUNG - Der Lötkolben wird über 300°C heiß - pass auf, dass du dich nicht verbrennst! - Wenn du dich verbrennst, halte die Stelle sofort unter kaltes fließendes Wasser - Arbeite in einem gut belüfteten Raum - Lötzinn kann giftiges Blei enthalten. Wasche dir nach dem Löten gut die Hände!
Als Rechtshänder nimmst du den Lötkolben in die rechte Hand und das Lötzinn in die linke Hand. Lege die Hände am Tisch auf, sodass die Handballen den Tisch berühren. Dann zitterst du viel weniger. Lasse den Lötkolben nicht unnötig lange an der Lötstelle, sonst kann das Bauteil durch die Hitze beschädigt werden! Eine Sekunde reicht völlig.
Spule etwa 5cm vom Lötzinn ab und biege es gerade. Halte es mit der linken Hand nahe der Stelle die du löten möchtest bereit.
Berühre nun mit der Spitze des Lötkolbens die Stelle die du lösten möchtest. Führe sofort das Lötzinn zur Lötkolben-Spitze und schmelze soviel Lötzinn, dass die stelle gut benetzt wird. Nicht zuviel, nicht zuwenig! Siehst du noch teile des Bautteils war es zu wenig Lötzinn. Entsteht eine Kugel war es zu viel.
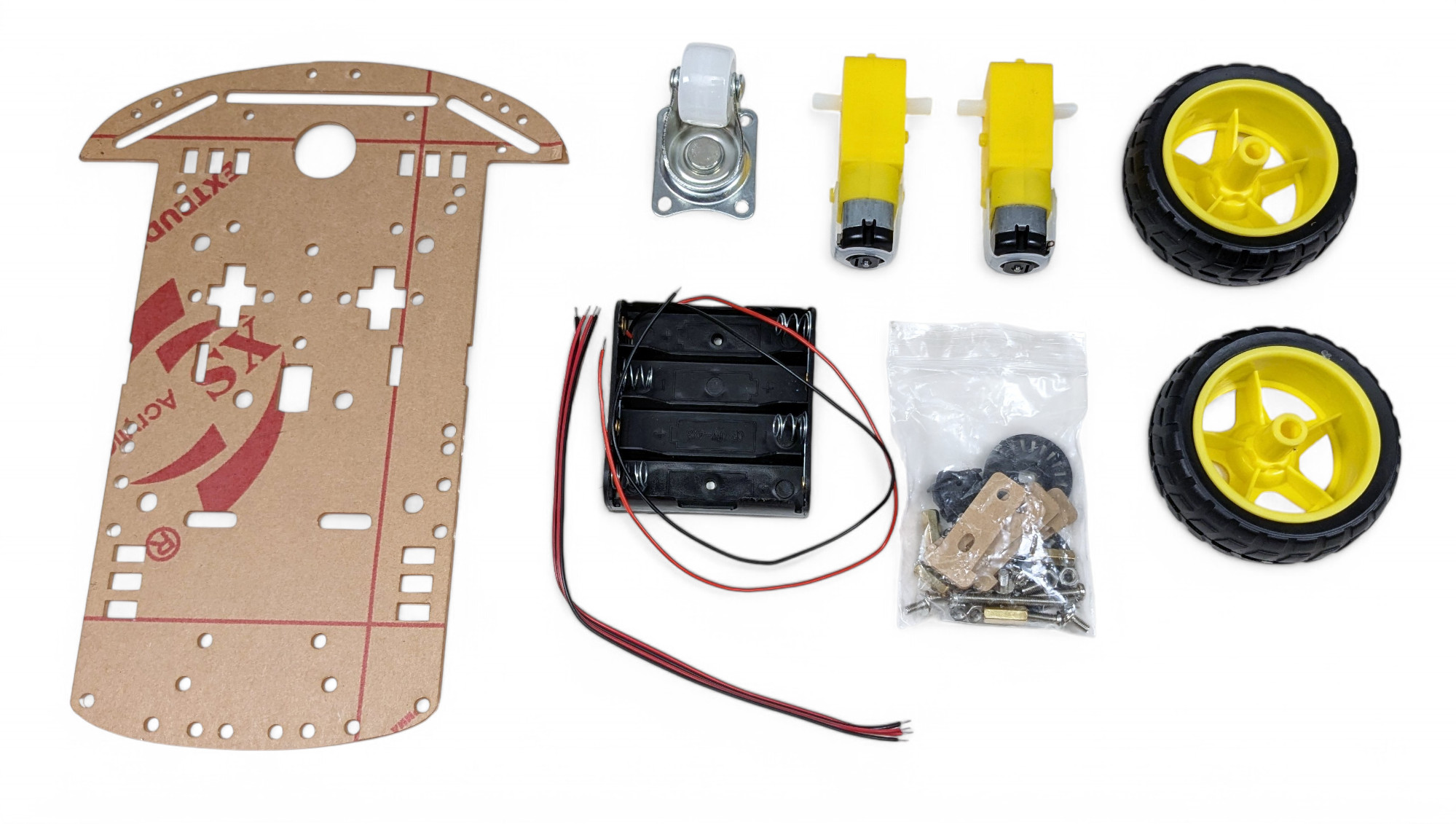
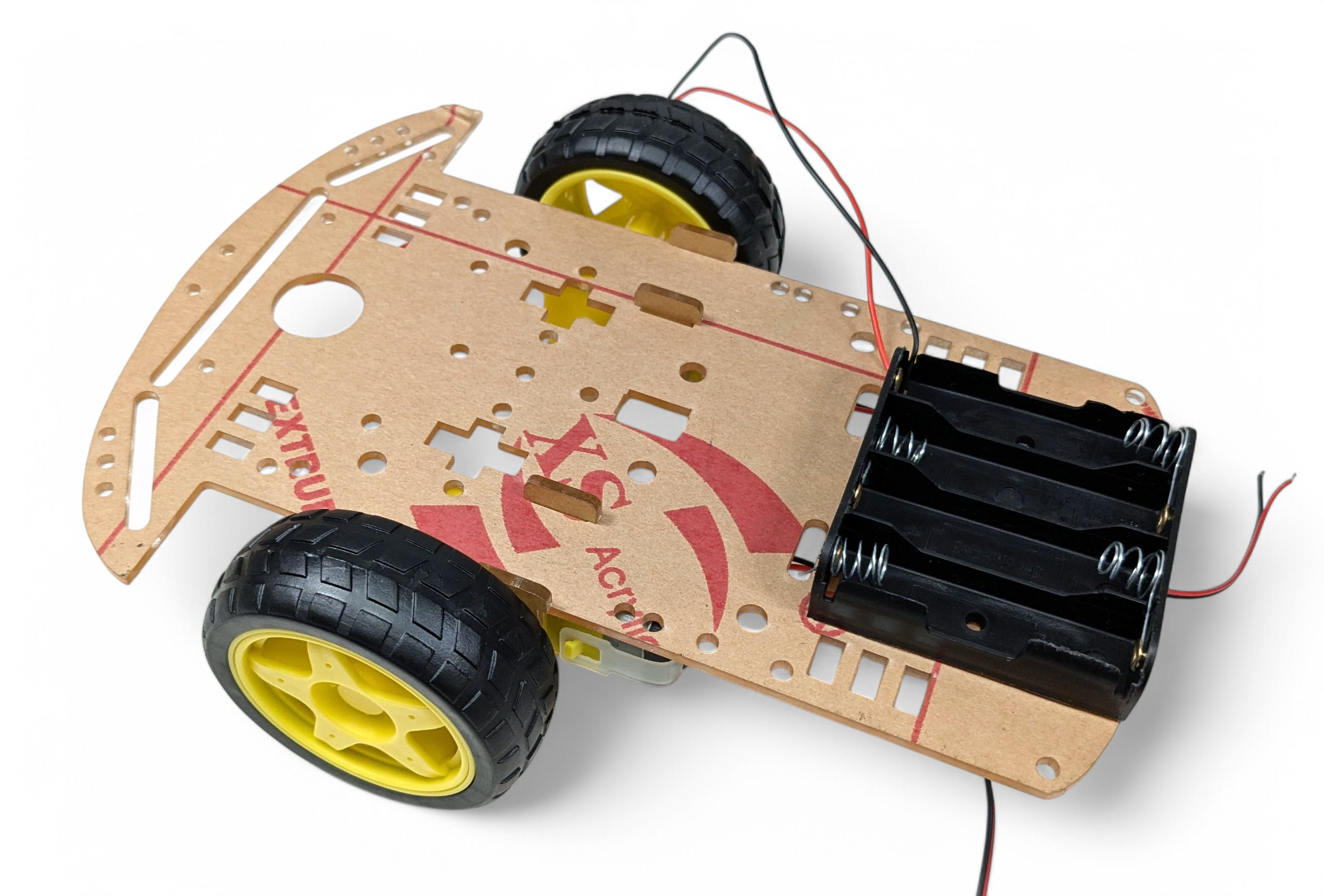
Für den Zusammenbau des Fahrgestells brauchst du folgende Teile:
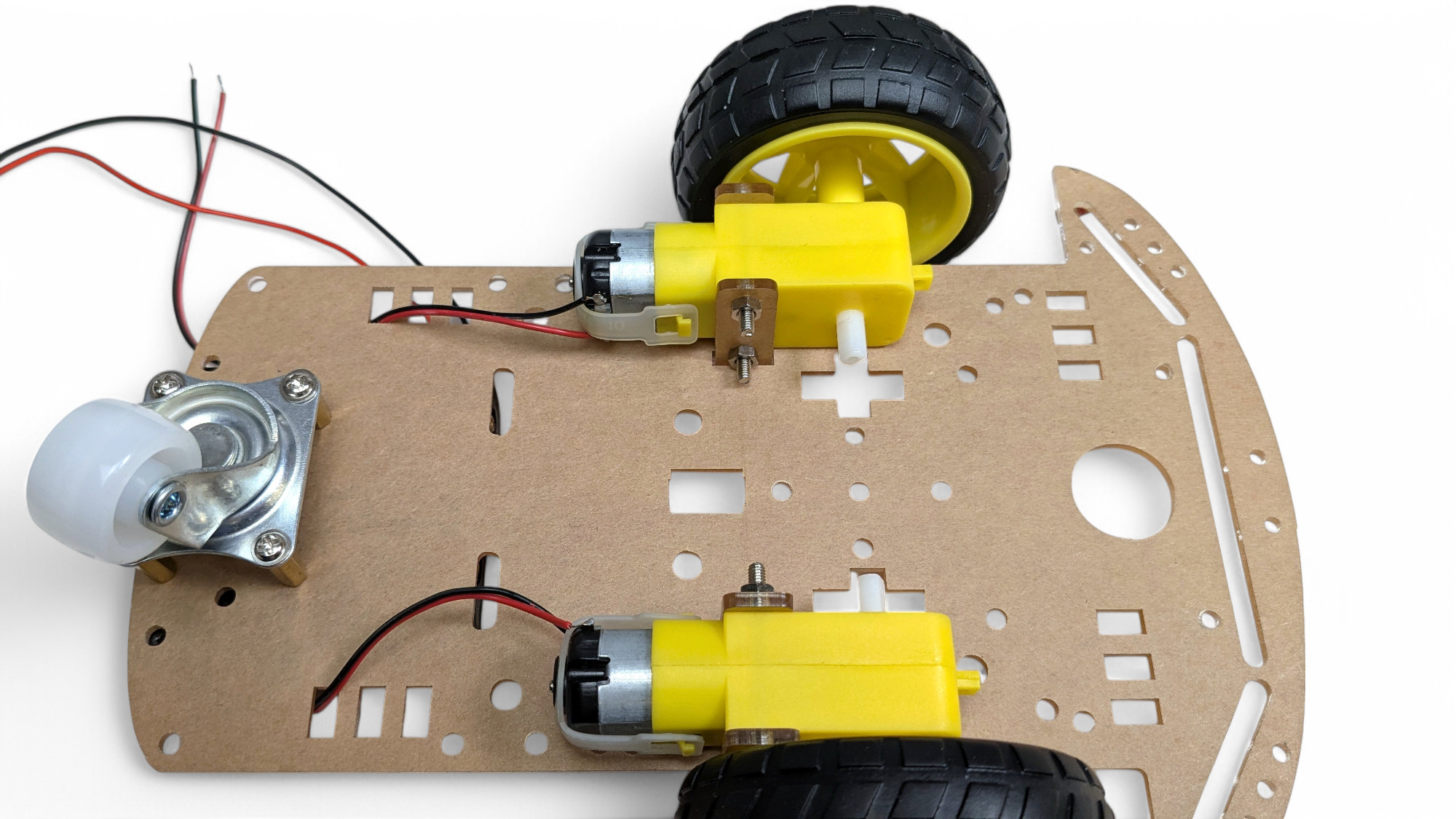
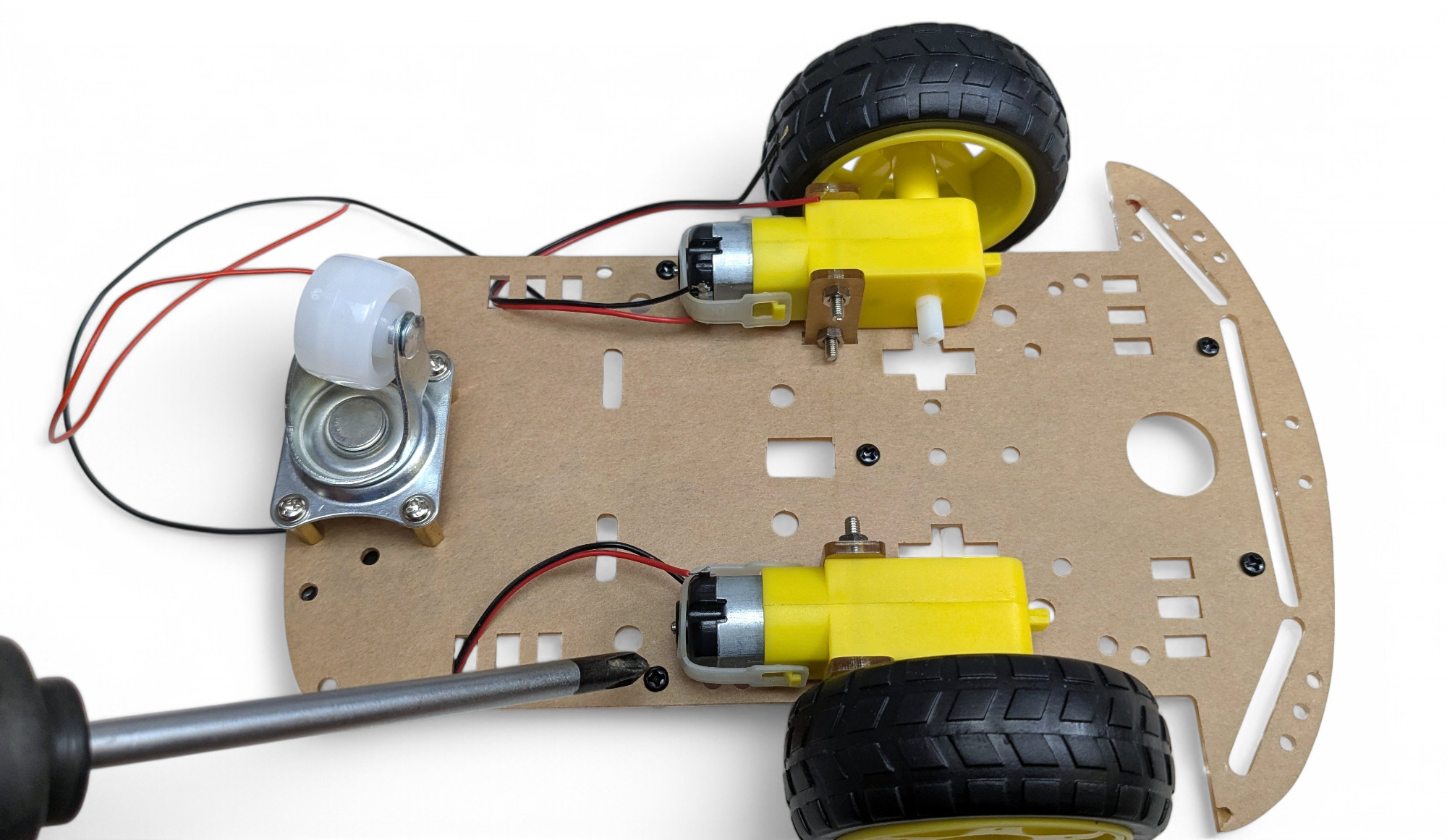
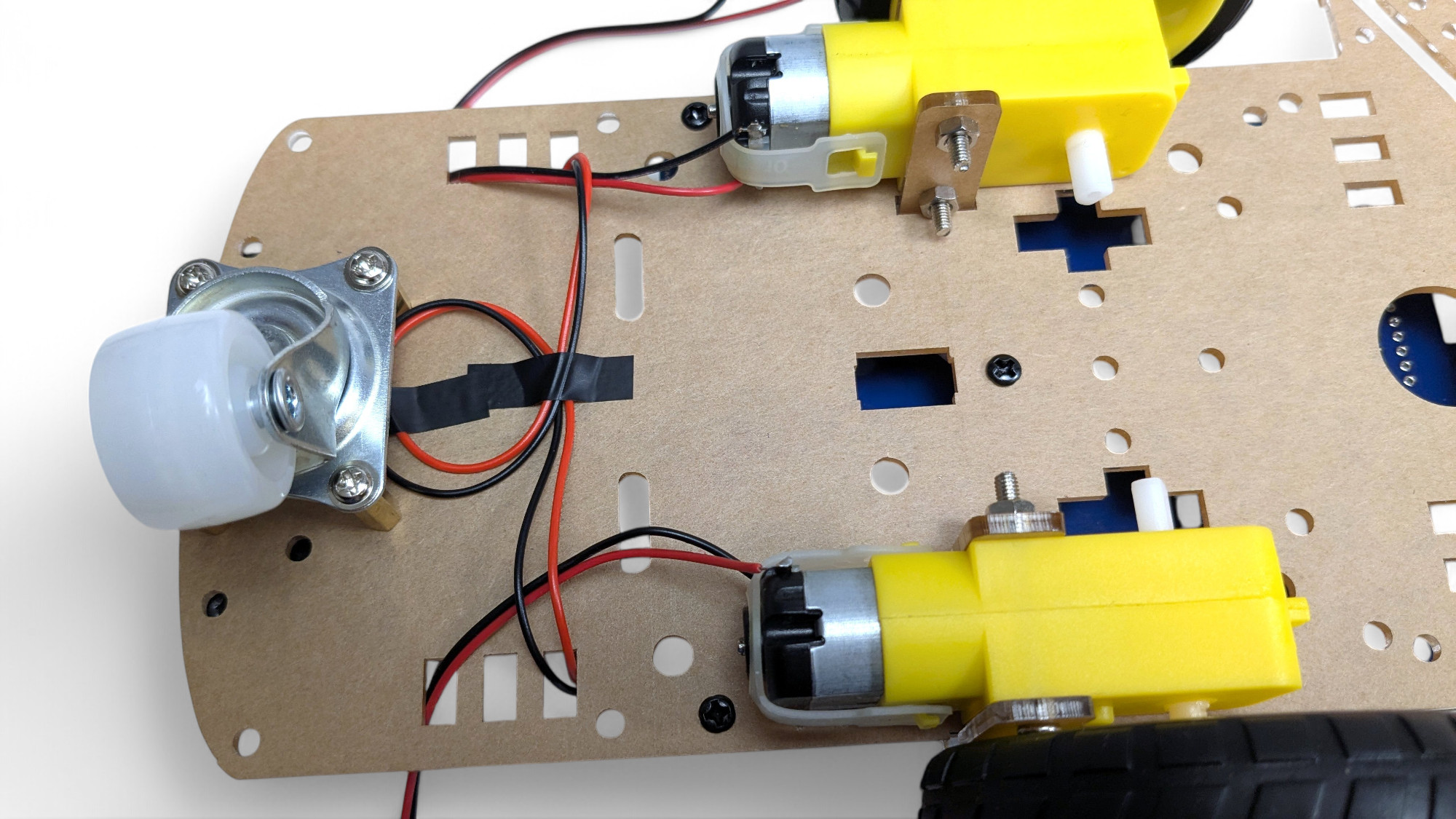
Als erstes bauen wir die Motoren ein.
Wenn die Kabel noch nicht an den Motoren angelötet sind erledigen wir das als erstes. Wenn du noch nie gelötet hast lies zuerst die Anleitung oben!
Wiederhole den Vorgang mit dem schwarzen Kabel und dann mit dem zweiten Motor.
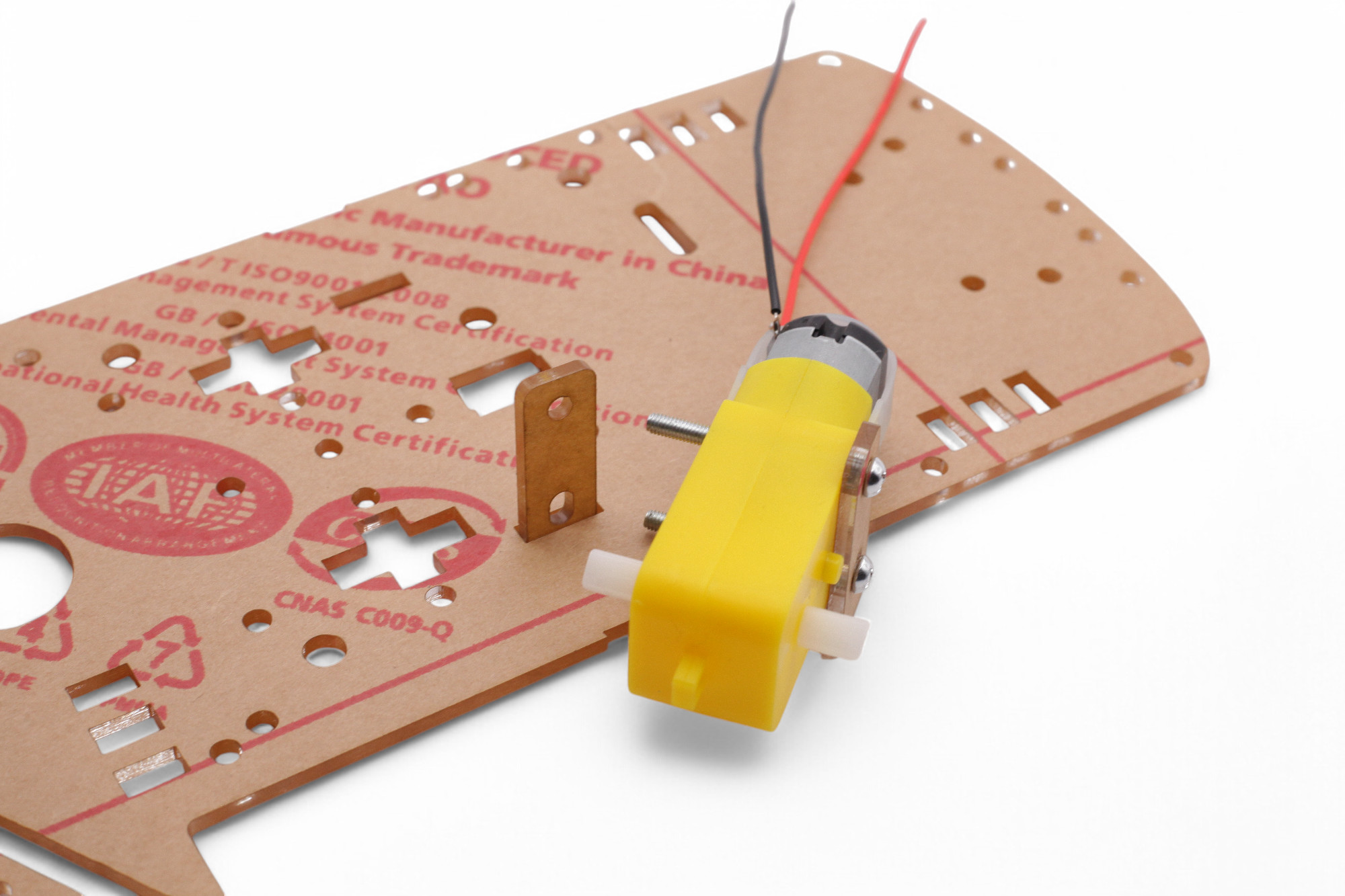
Beginne wir mit einem Motor. Dieser Vorgang erfordert etwas Fingergeschick. Gib nicht auf, du schaffst das!

Nimm den Motor so in die Hand, dass die Anschlusskabeln von dir wegsehen. Dann stecke zwei lange M3 Schrauben durch das T-förmige Plättchen und den Motor:

Stecke das andere Plättchen von oben durch den Schlitz:

Drehe die Platte um und stecke die Schrauben durch die Löcher vom zweiten Plättchen. Das erste Plättchen am Rand soll in der kleinen Ausparung landen:
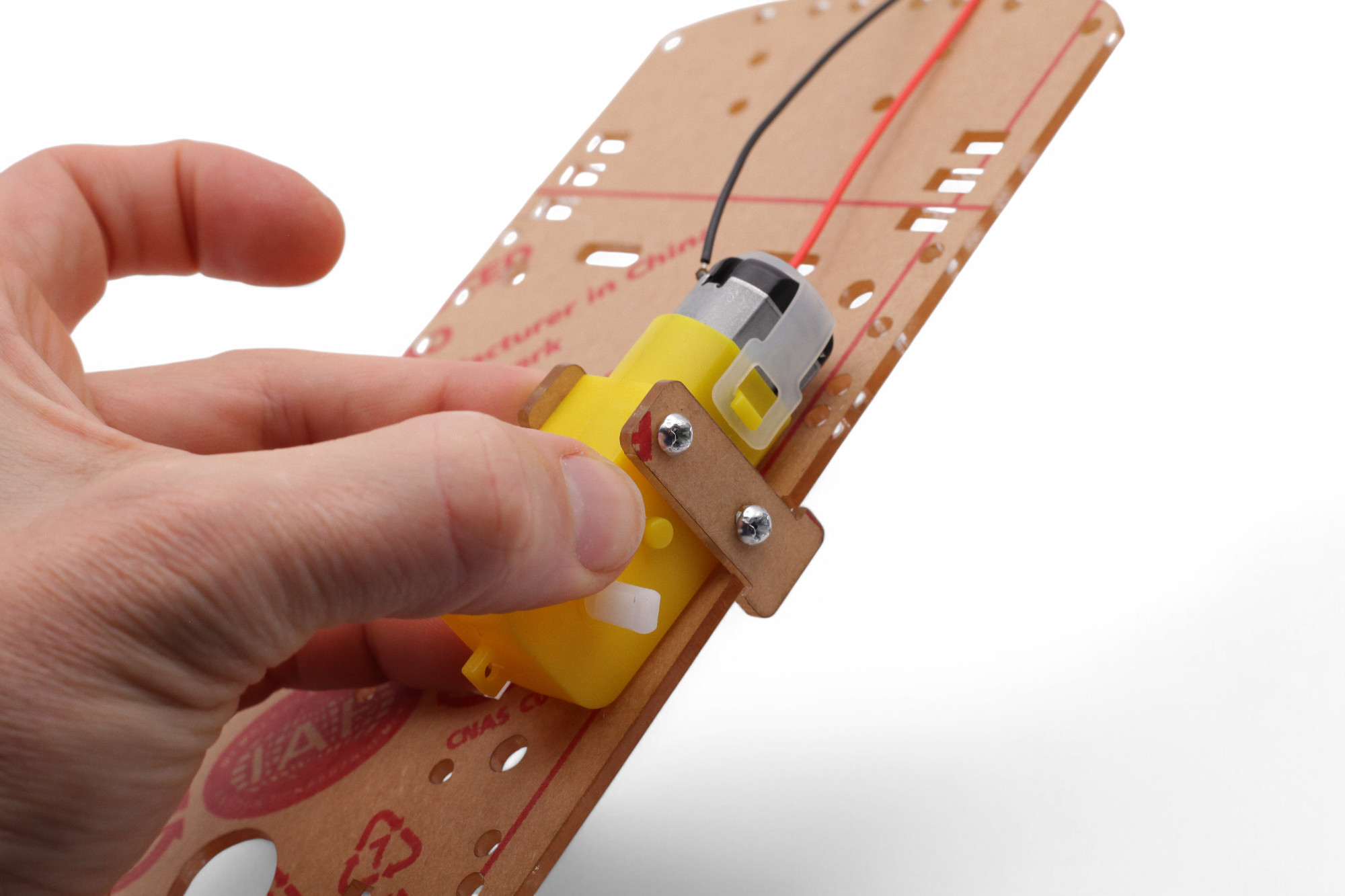
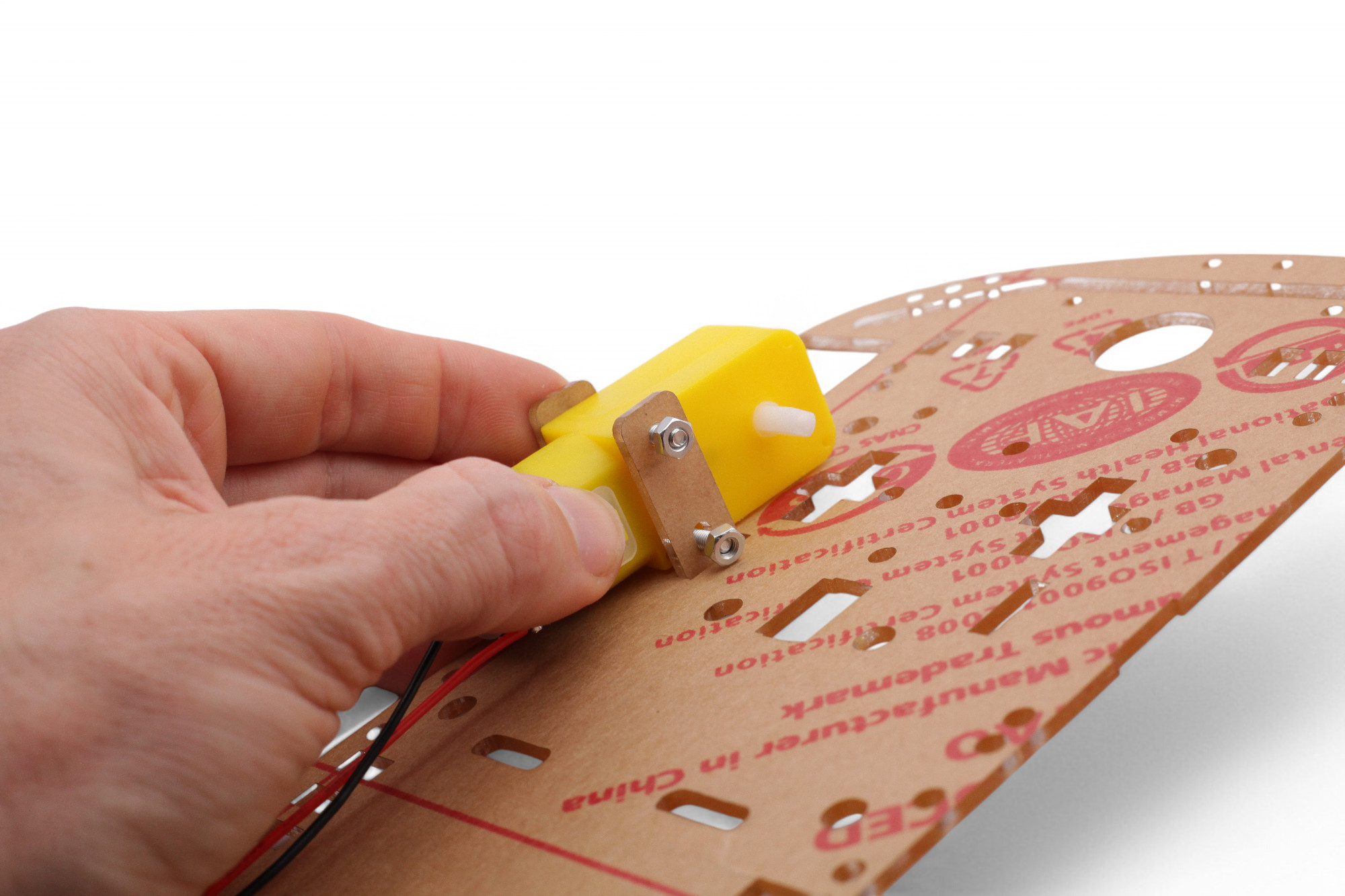
Schraube nun die Muttern auf die Schrauben und ziehe sie mit einem Schraubendreher fest:
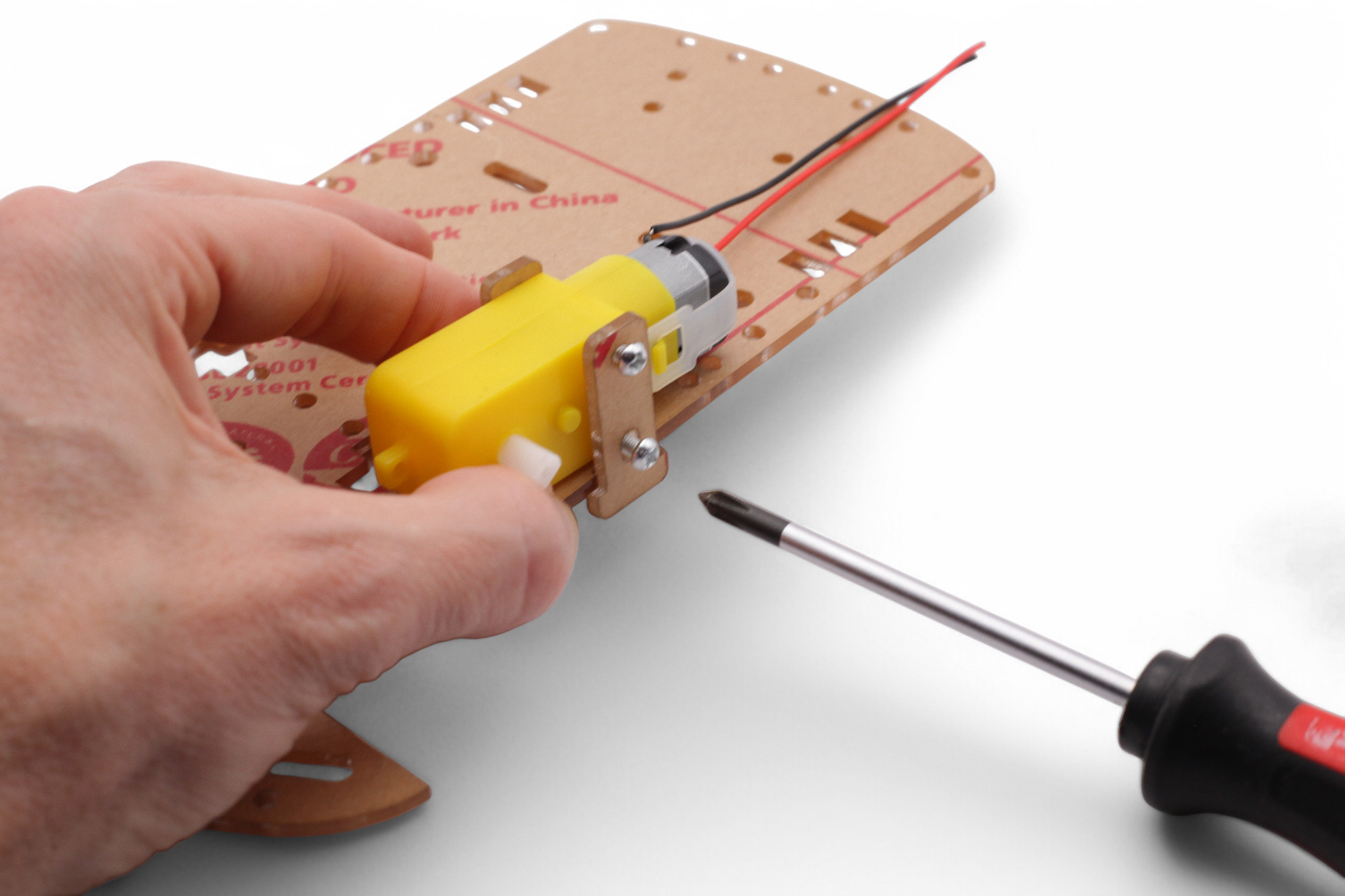
Wiederhole das ganze für den zweiten Motor spiegelverkehrt. Achte darauf, dass die Anschluskabeln der Motoren nach innen schauen.
Nun montieren wir das kleine Rad für hinten. Suche folgende Teile:
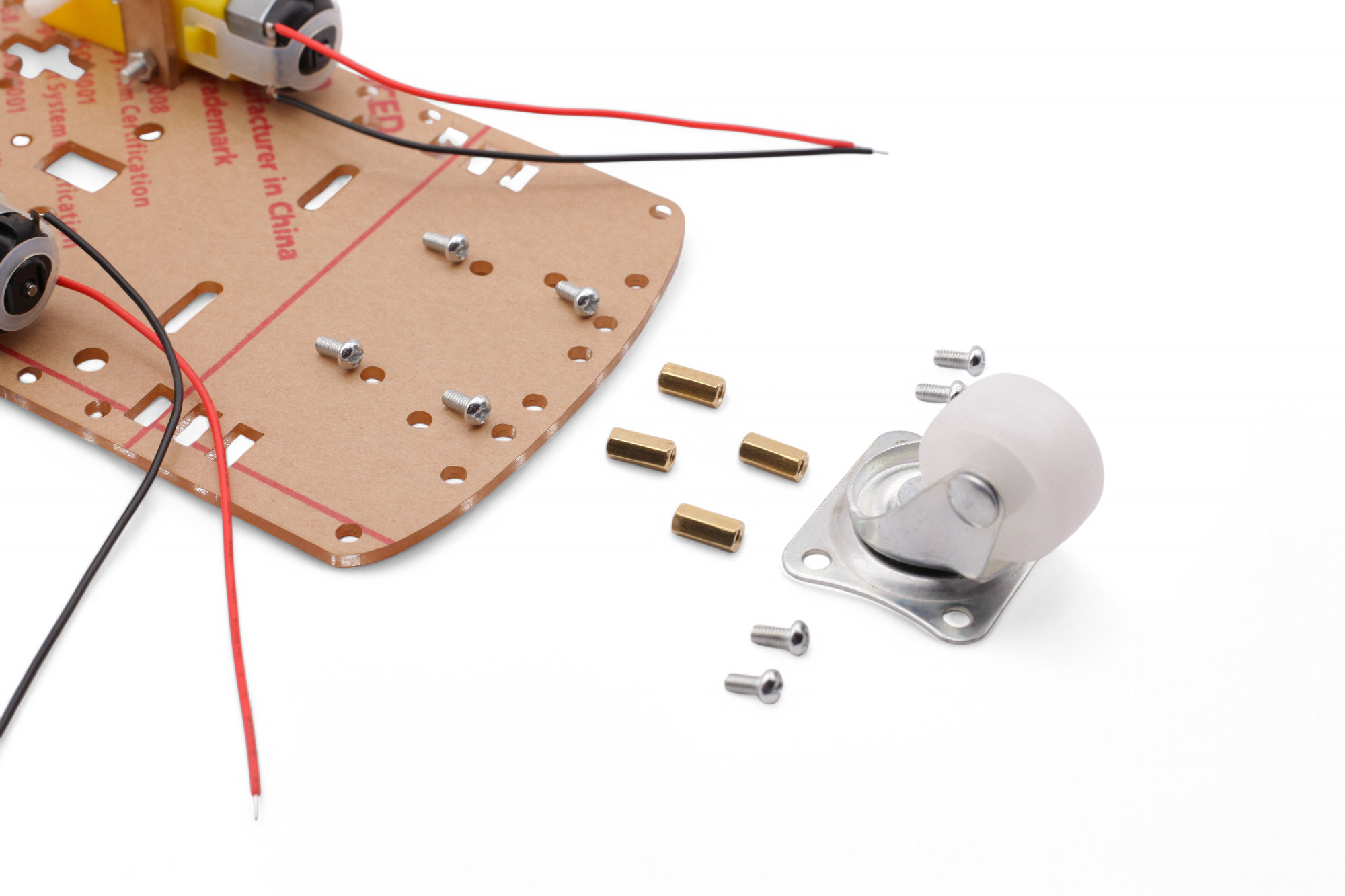
Schraube zuerst die Messing-Verlängerungen auf das Rad. Lasse die Schrauben noch locker!

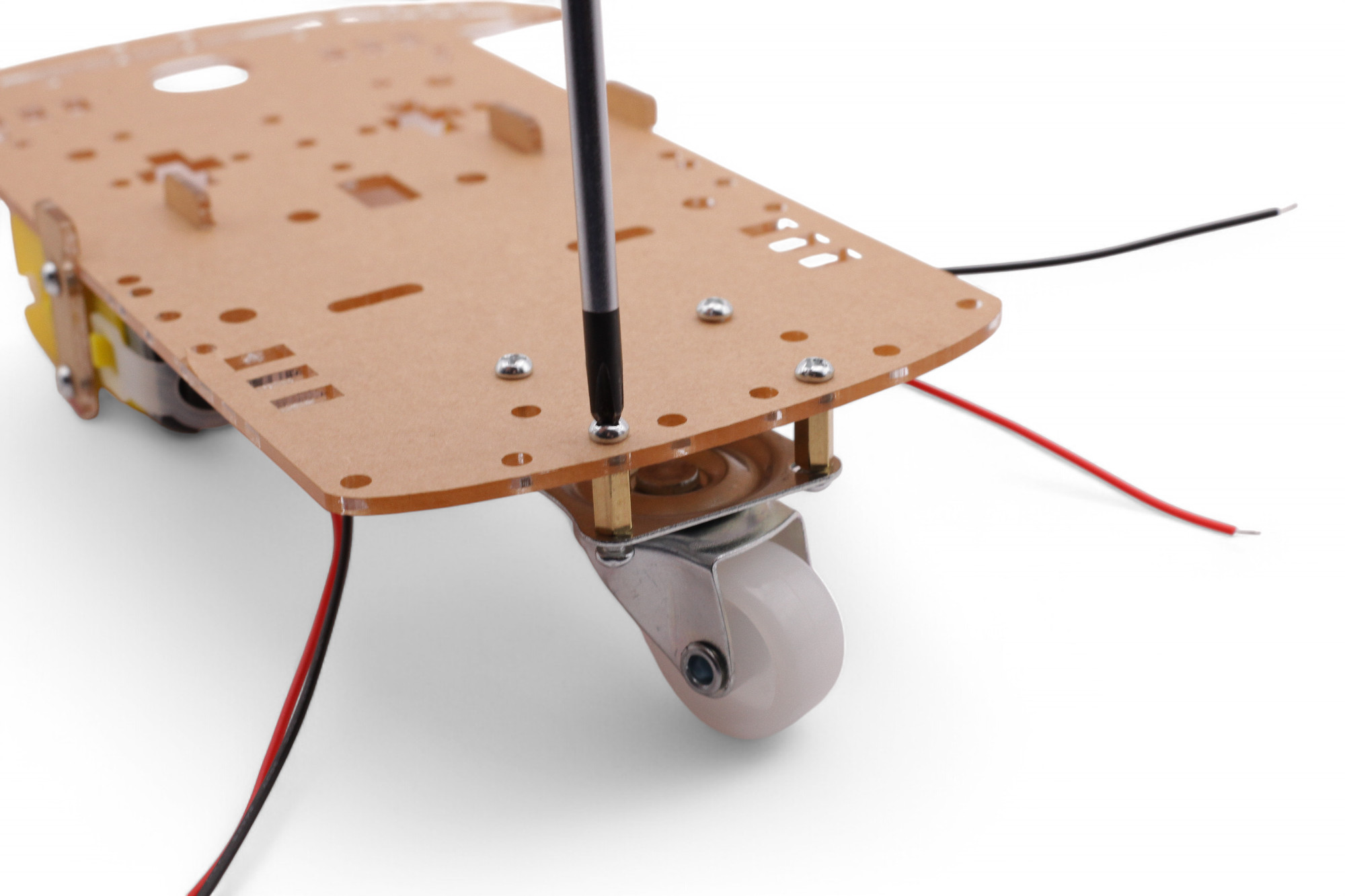
Dann schraube das Rad auf die Platte. Ziehe nun alle Schrauben fest:
Stecke nun die großen Räder auf die Motoren:

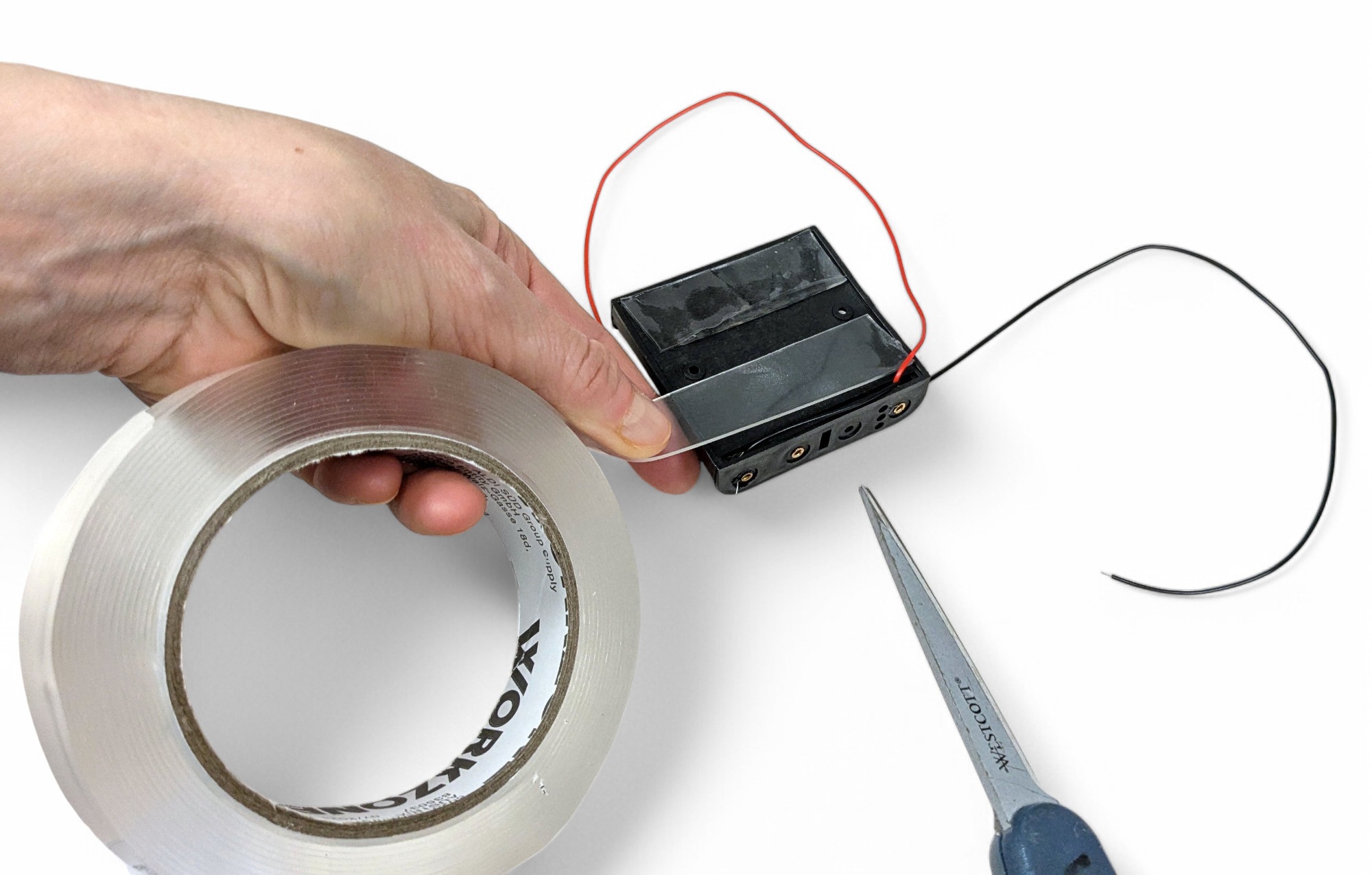
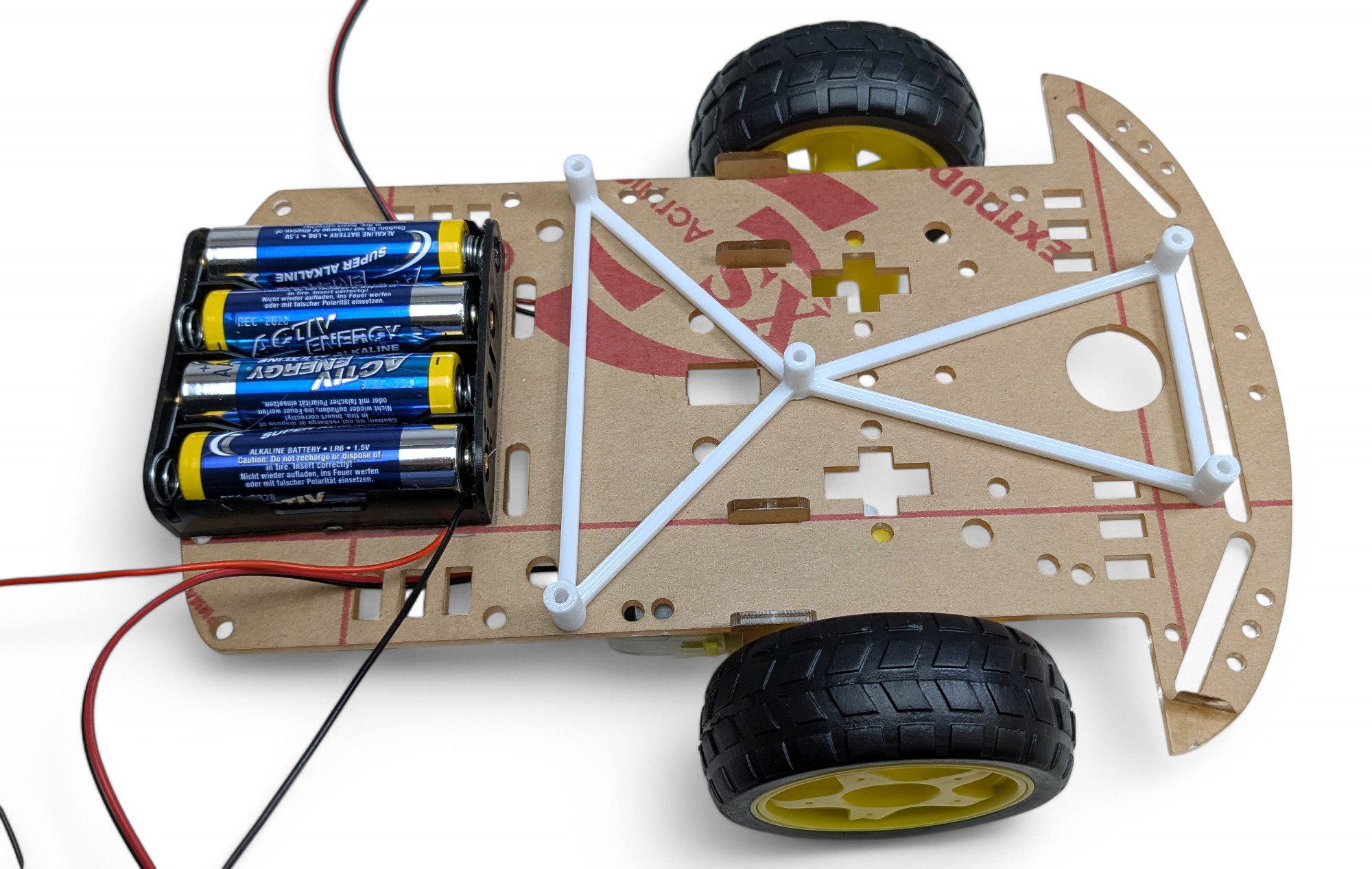
Schneide zwei Streifen von dickem, doppelseitigen Klebeband ab und klebe es auf die Unterseite des Batteriehalters:
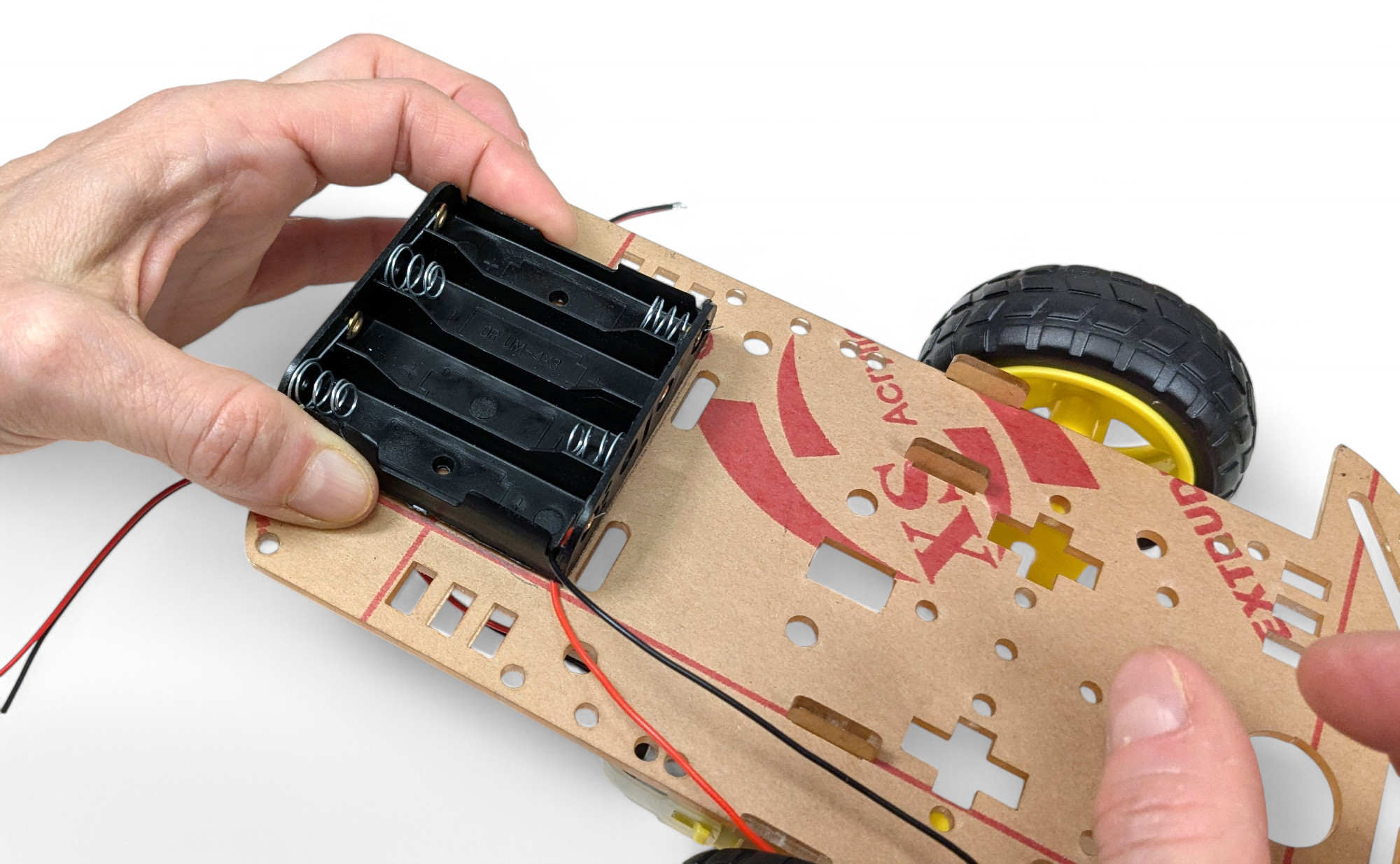
Nun ziehe die Schutzfolie des Klebebands ab und klebe den Batteriehalter ganz hinten mittig auf die Grundplatte - dort wo das kleine Hinterrad ist. Es soll hinten mit der Grundplatte abschließen:
Dein Fahrgestell ist fertig! Gratuliere!
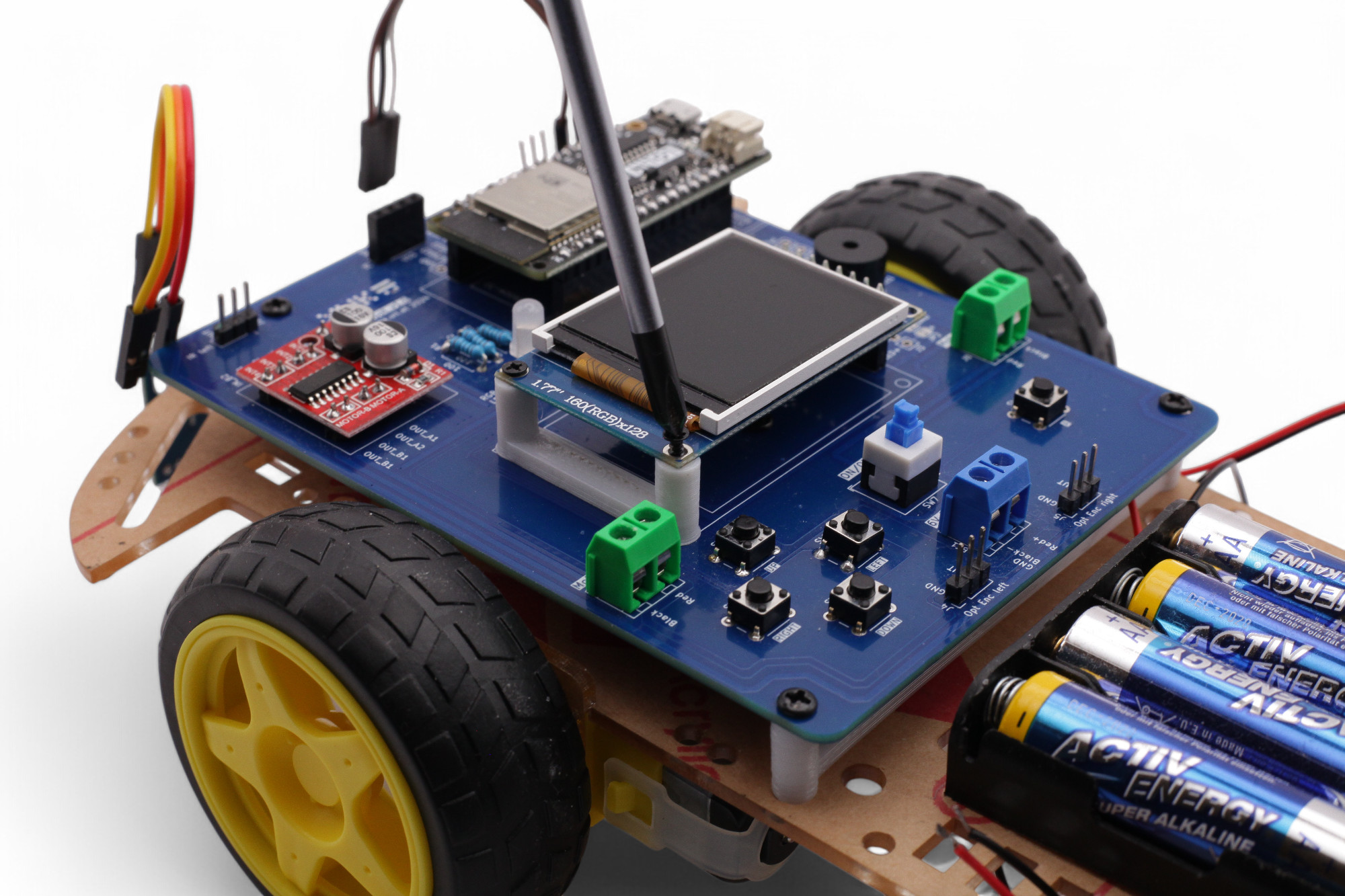
Als nächstes löten wir die Bauteile auf die Platine. Wir bauen hier einen richtigen kleinen Computer mit Bildschirm, Tasten und Lautsprecher!
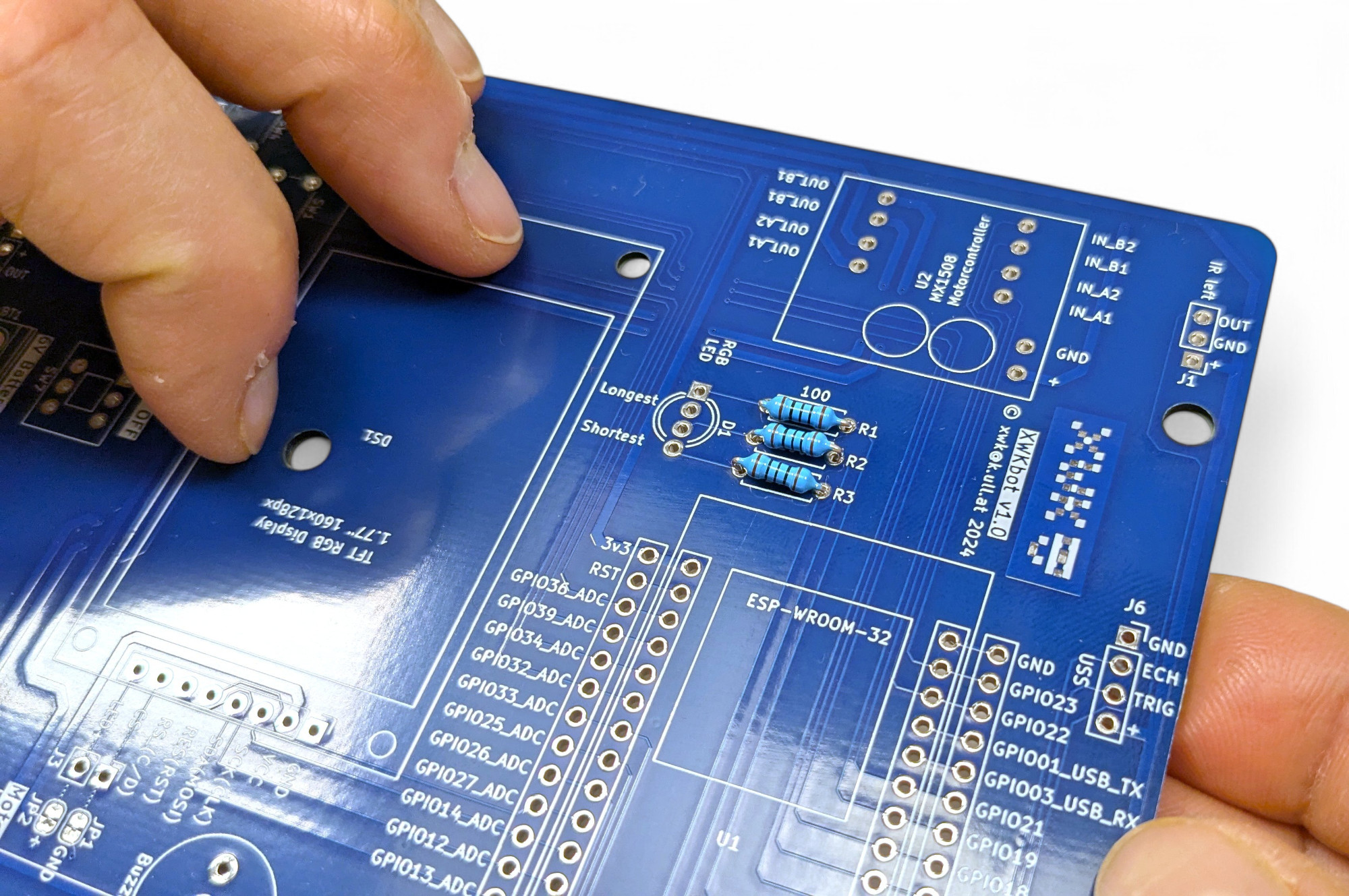
Hier siehst du alle Bauteile die wir verwenden werden. Sieh dir die Platine genau an. Kannst du die Verbindungen zwischen den einzelnen Löchern für die Bauteile entdecken?
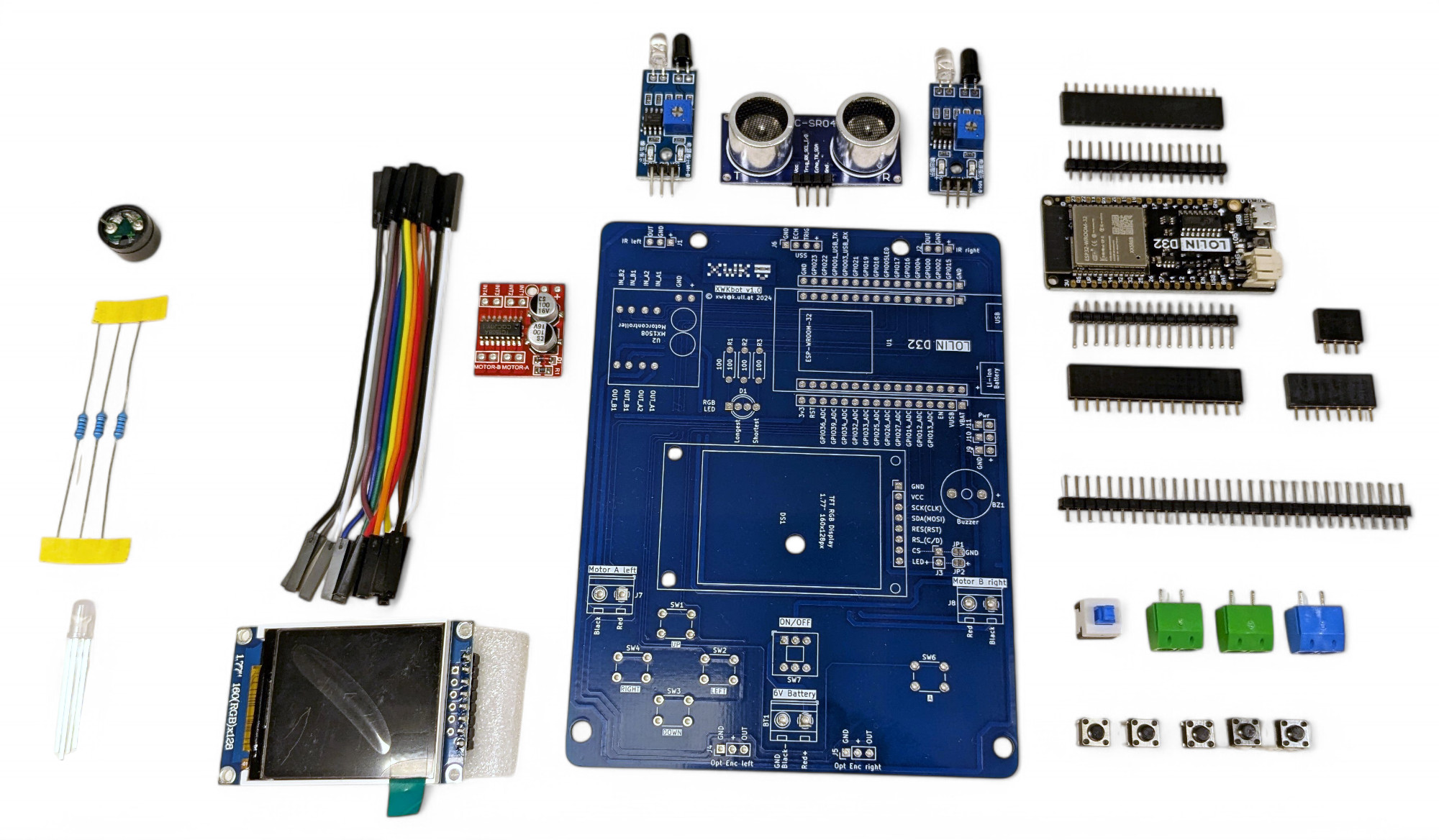
Eine Platine oder Leiterplatte (Englisch “PCB - Printed Circuit Board”) besteht aus einer flachen Platte aus isolierendem Material, auf der leitende Bahnen aus Kupfer aufgebracht sind. Diese Leiterbahnen verbinden die verschiedenen elektronischen Bauteile miteinander ohne das man alles mit Kabeln verbinden muss. Durch diese Verbindungen können komplexe elektronische Schaltungen auf kleinstem Raum realisiert werden, was die Basis für moderne Technik wie Smartphones, Computer und andere digitale Geräte bildet.
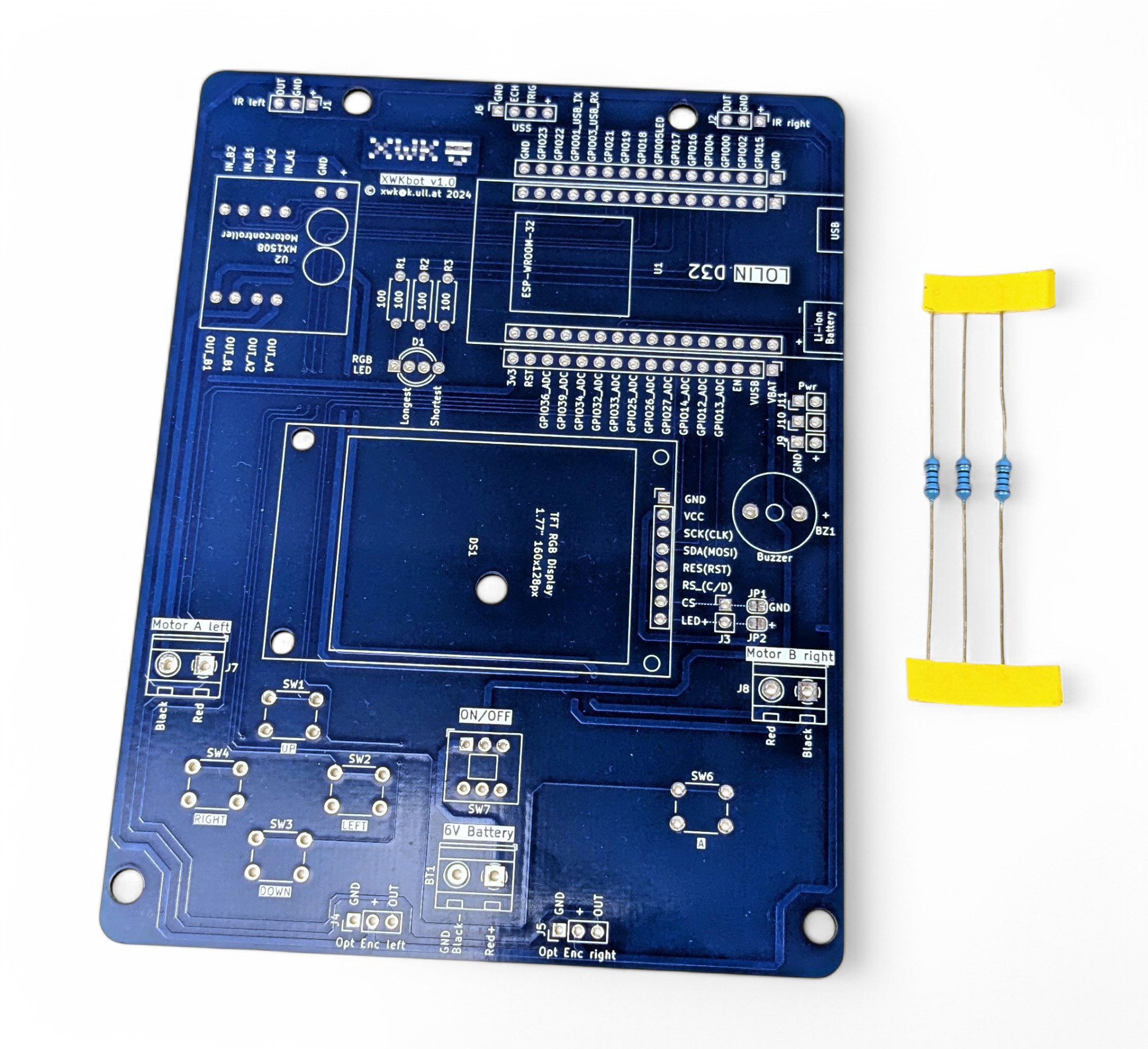
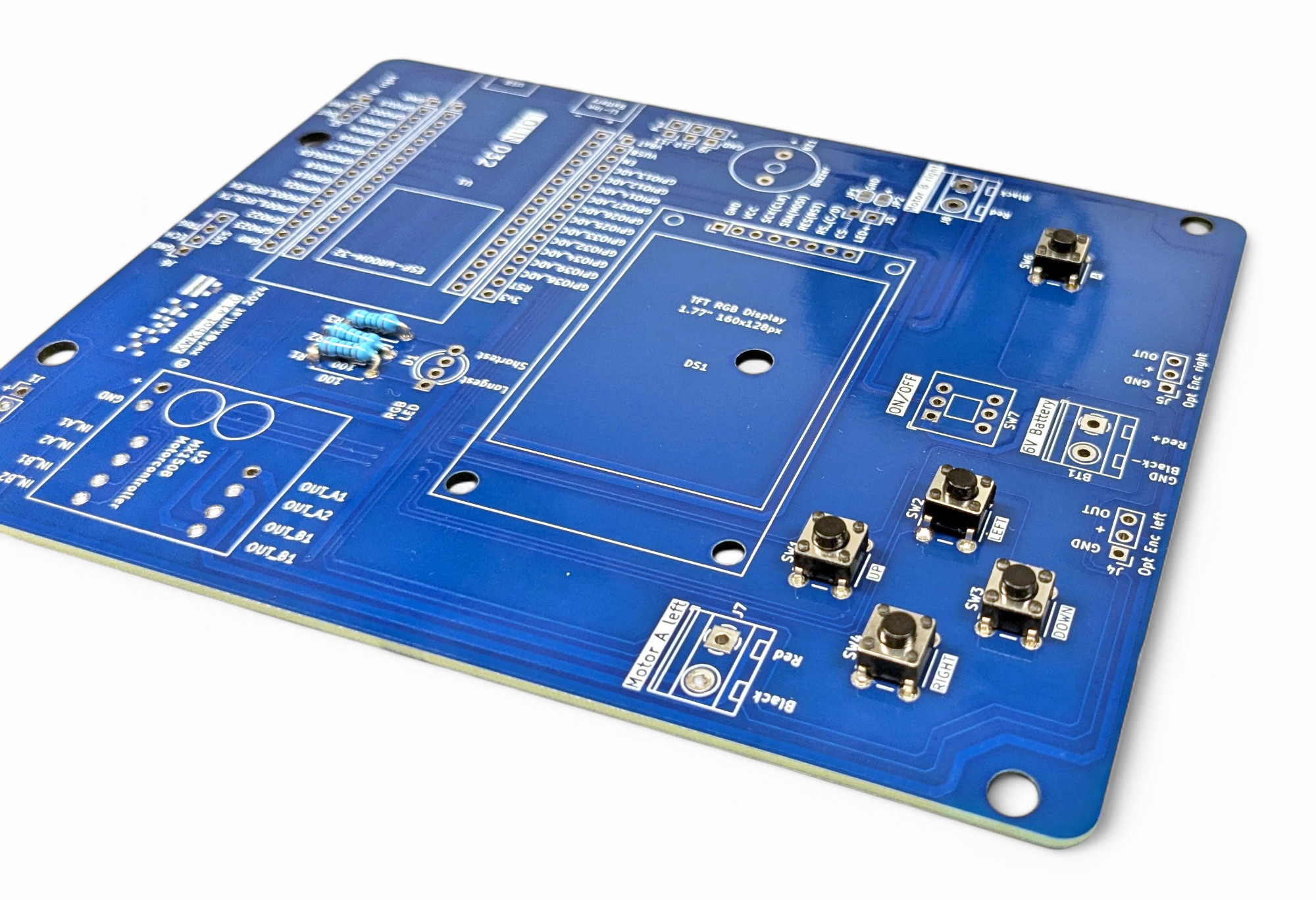
Der Pro-Tipp für den Platinen-Zusammenbau: beginne mit den niedrigsten Bauteilen. So kannst du die Platine umdrehen, ohne dass die Bauteile herausfallen. Die niedrigsten Bauteile beim XWK-Bot sind die Widerstände.
Widerstände erschweren dem Strom den Durchfluss. Wie stark ein Widerstand ist wird in “Ohm Ω” angegeben, und den Wert kann man anhand der färbigen Ringe ablesen.
Suche den Platz für die Widerstände auf der Platine. Sie sind mit R1, R2 und R3 beschriftet (“R” steht für “Resistor” - das englische Wort für Widerstand). Diese drei Vor-Widerstände werden unsere färbige LED (Leuchtdiode) schützen, damit sie nicht durchbrennt.
Biege die Drähte der Widerstände so nach wie möglich am “Körper” rechtwinkelig ab:
Suche auf der Platine R1, R2 und R3. Stecke die Wiederstände von oben durch die Löcher in der Platine. Drehe dann die Platine um und biege die Drähte etwas auseinander, dann können die Widerstände nicht herausfallen.
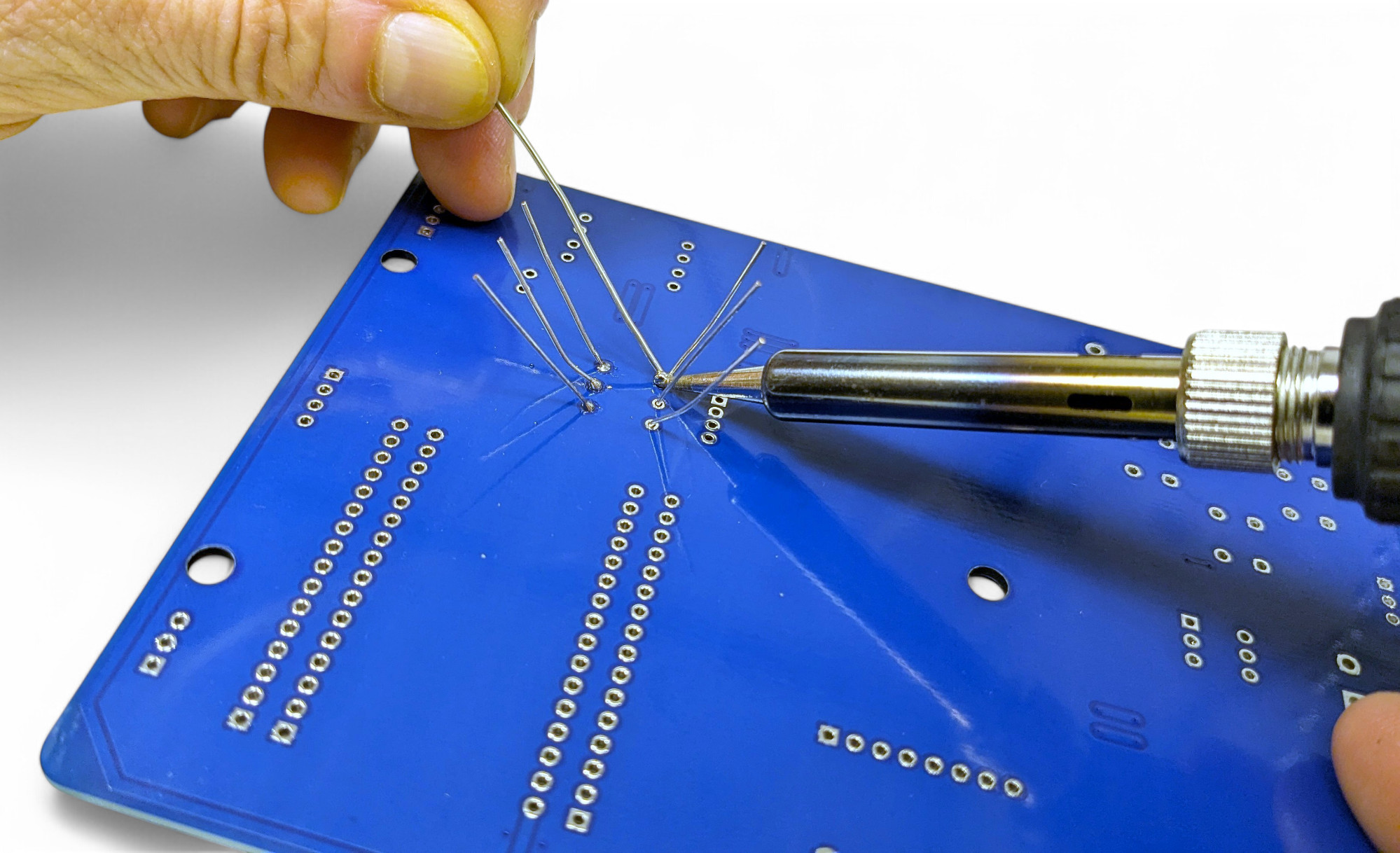
Nun geht es ans Löten! Falls du noch nie gelötet hast lies das Kapitel am Anfang dieser Anleitung!
Als Rechtshänder nimmst du am besten den Lötkolben in die rechte Hand und das Lötzinn in die linke Hand. Lege die Hände am Tisch auf, sodass die Handballen den Tisch berühren. Dann zitterst du viel weniger. Lasse den Lötkolben nicht unnötig lange an der Lötstelle, sonst kann das Bauteil durch die Hitze beschädigt werden! Eine Sekunde reicht völlig.
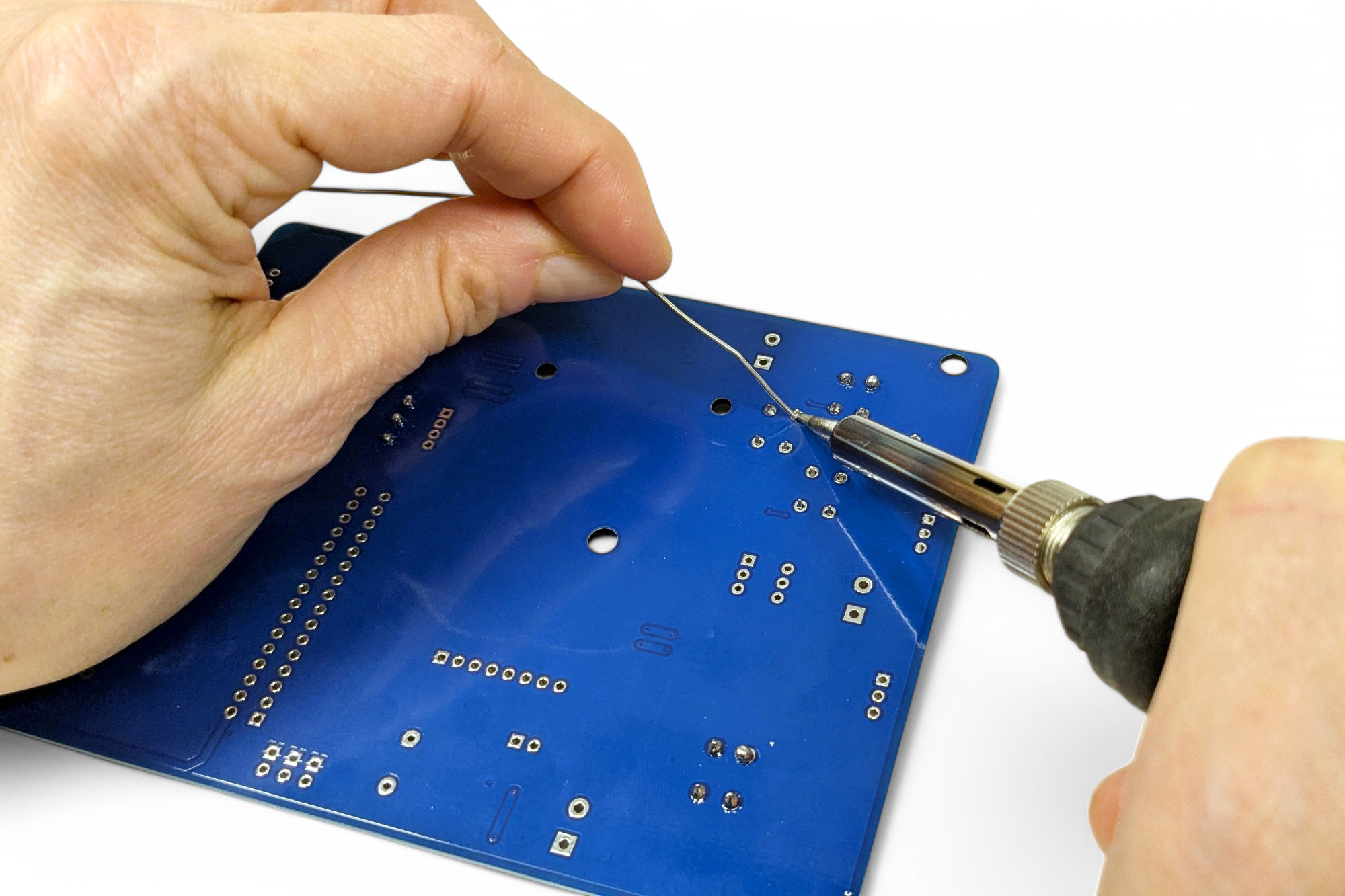
Positioniere die Spitze des Lötkolbens so, dass die Spotze den silberfarbenen Ring der Platine und den Draht des Widerstands berührt.
Führe nun das Lötzinn zur Lötkolben-Spitze und schmelze soviel Lötzinn an der Lötkolben-Spitze, dass ein schöner Kegel entsteht. Siehst du noch einen Teil vom Loch in der Platine war es zu wenig Lötzinn. Entsteht eine Kugel war es zu viel.
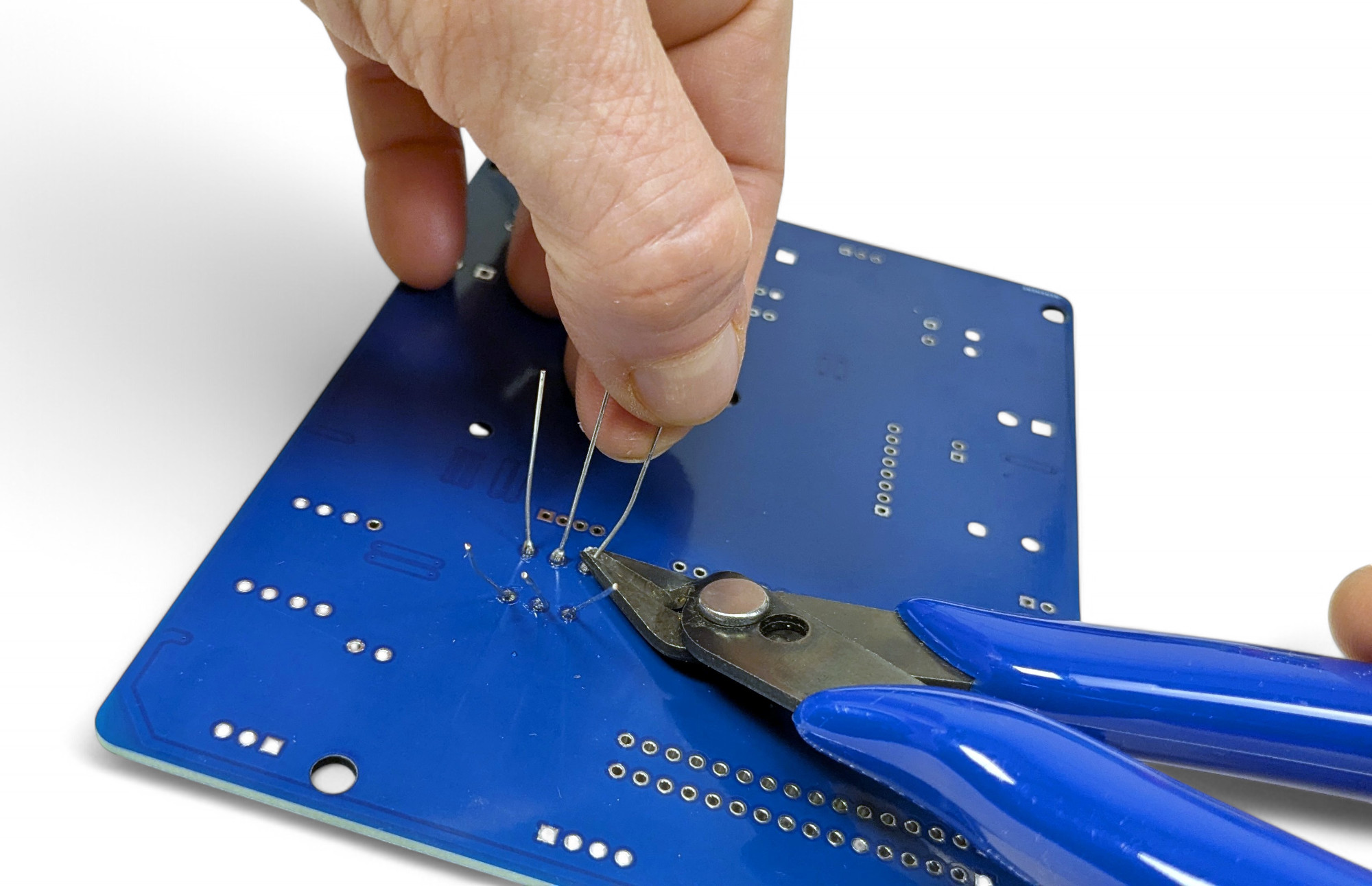
Zwicke nun mit dem Seitenschneider die überstehnden Drähte direkt über der Lötstelle ab:
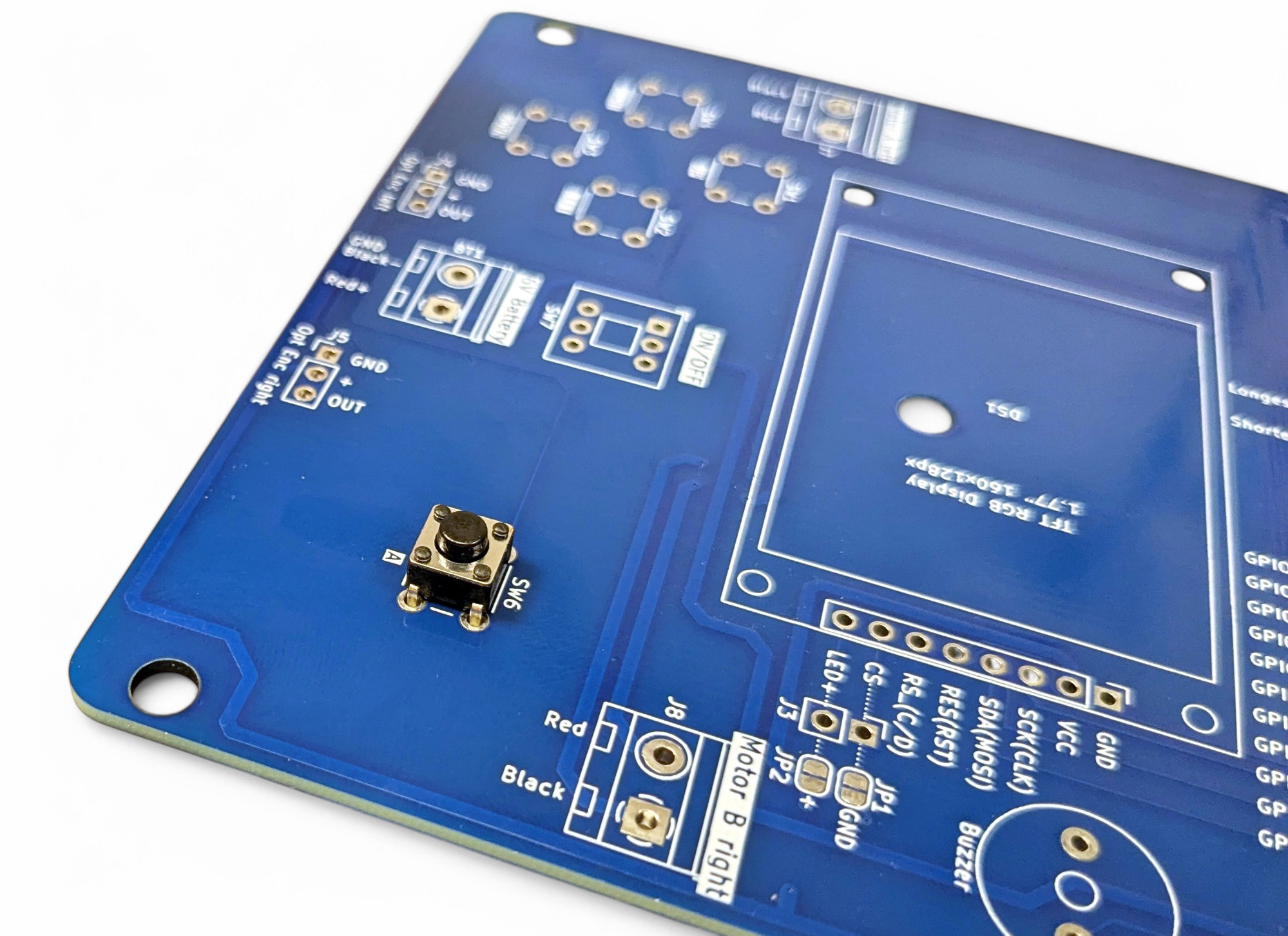
Die nächst-niedrigen Bauteile sind die Taster. Taster sind Schalter die normalerweise keine Stromverbindung herstellen. Aber wenn du sie drückst berühren sich im Inneren zwei Metallteile und der elektrische Strom kann fließen. Lässt du den Taster los wird der Kontakt durch eine Feder wieder unterbrochen. Die Taster sind mit “SW1” bis “SW6” bezeichnet - “SW” steht für englisch “Switch”, also “Schalter”. Stecke gleich alle Schalter in die Platine. Du kannst dabei nichts falsch machen, da die Polarität (also die Richtung) egal ist. Die Schalter sollten durch die gebogenen “Füßchen” von selbst in der Platine halten. Drehe die Platine dann vorsichtig um und löte alle Anschlüsse der Taster fest:
Bravo du hast jetzt ein Gamepad wie von einer Spielkonsole gelötet!
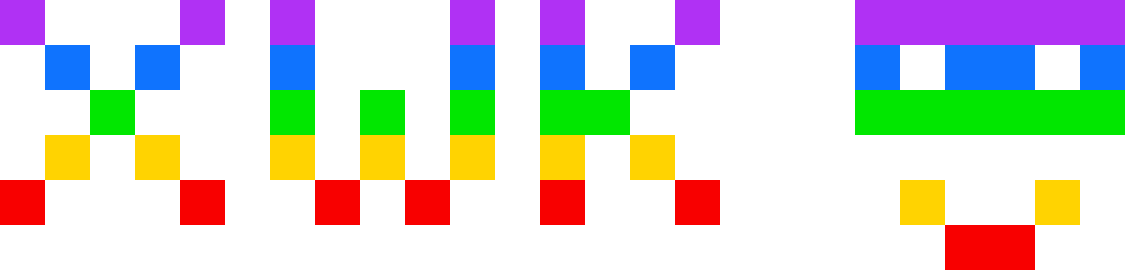
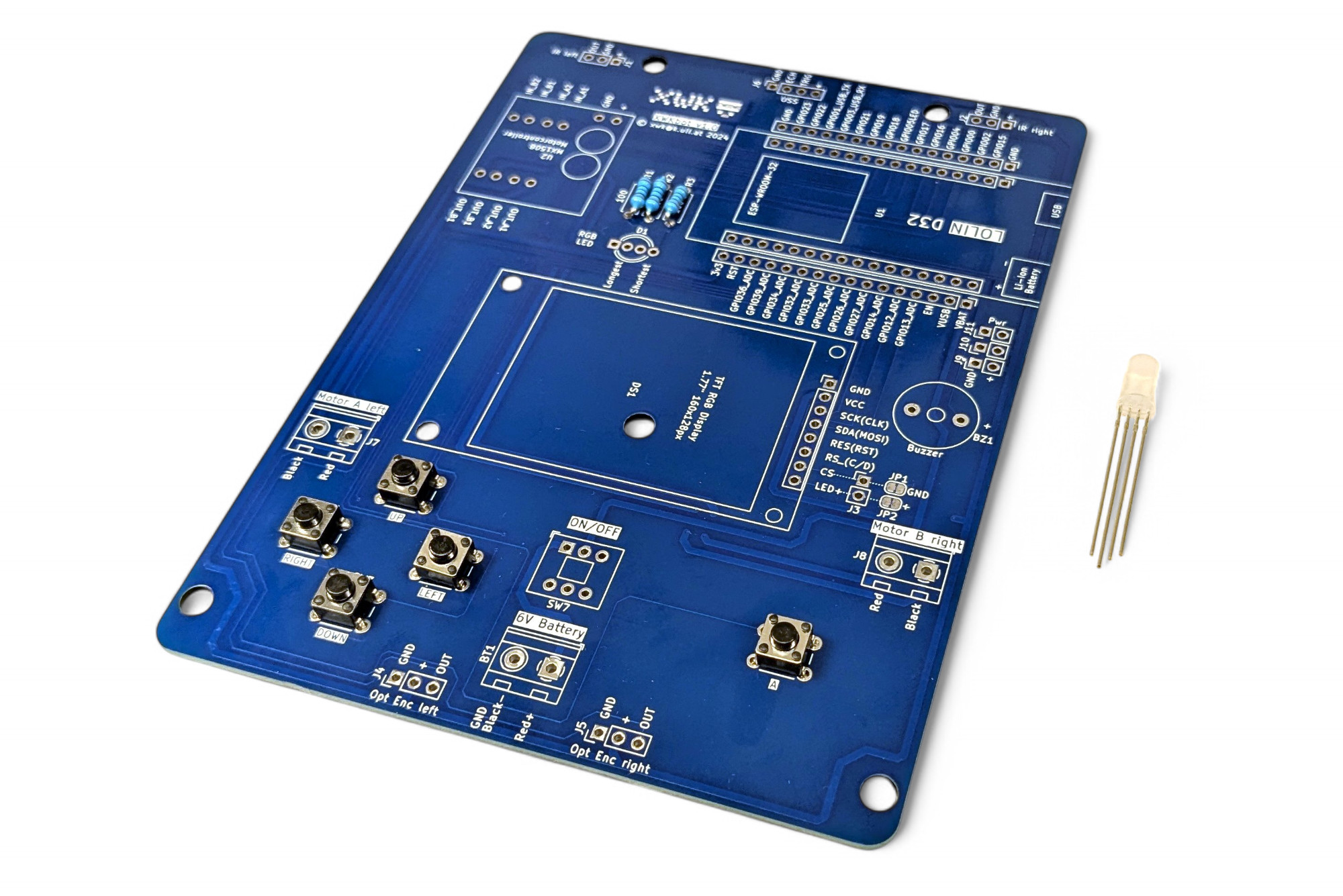
Als nächste löten wir die RGB-Leuchtdiode (LED) ein. Hier sind drei Leuchtdioden mit den Farben rot, grün und blau in einem Gehäuse eingebaut. Aus diesen drei Grundfarben kann man alle Farben mischen!
Dioden sind elektrische Bauteile die den Strom nur in eine Richtung durchlassen. Leuchtdioden (LED) geben dabei Licht ab. Es gibt sie in verschiedenen Farben. Achtung, nachdem der Strom nur in eine Richtung fließen kann musst du auf die Stromrichtung (Polarität) achten!
Biege die vier Anschlussdrähte der LED leicht auseinander damit sie in die Löcher auf der Platine passen. Nun suche den richtigen Platz: “D1”.
Achte genau darauf wie du die LED einlötest! Du musst den längsten und kürzesten Anschluss der LED finden und passend zur Beschriftung auf der Platine einlöten!
TODO: additive Farbmischung
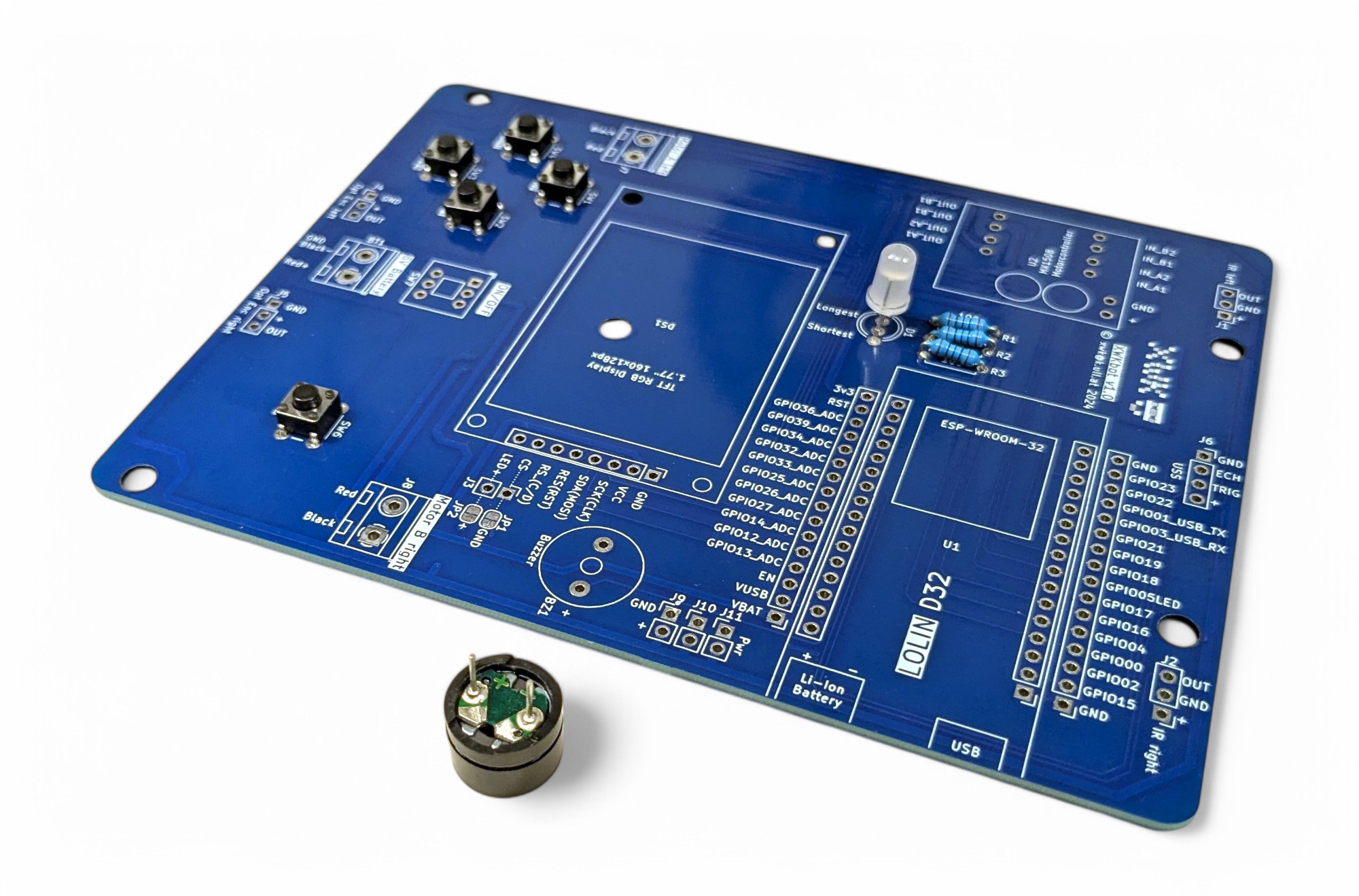
Nun löten wir unseren kleinen Lautsprecher ein, damit der XWK-Bot Töne von sich geben kann!
Das ist ein Piezo-Buzzer ist ein elektronisches Bauteil, das durch Anlegen einer elektrischen Spannung an ein piezoelektrisches Material mechanische Schwingungen erzeugt, die als hörbarer Ton wahrgenommen werden.
Finde auf der Platine “BZ1” und löte den Lautsprecher ein. Die Richtung der Anschlüsse ist egal.
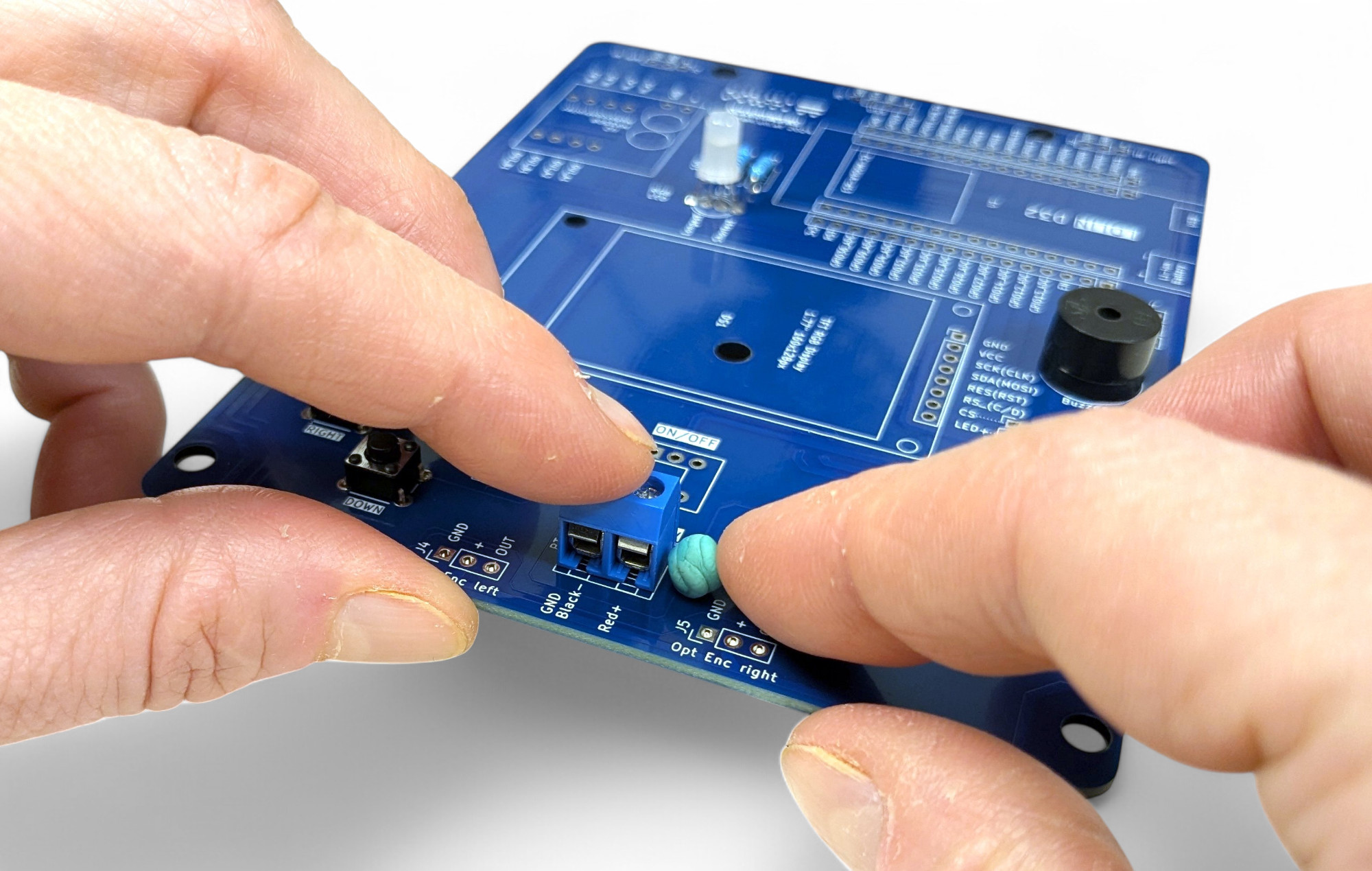
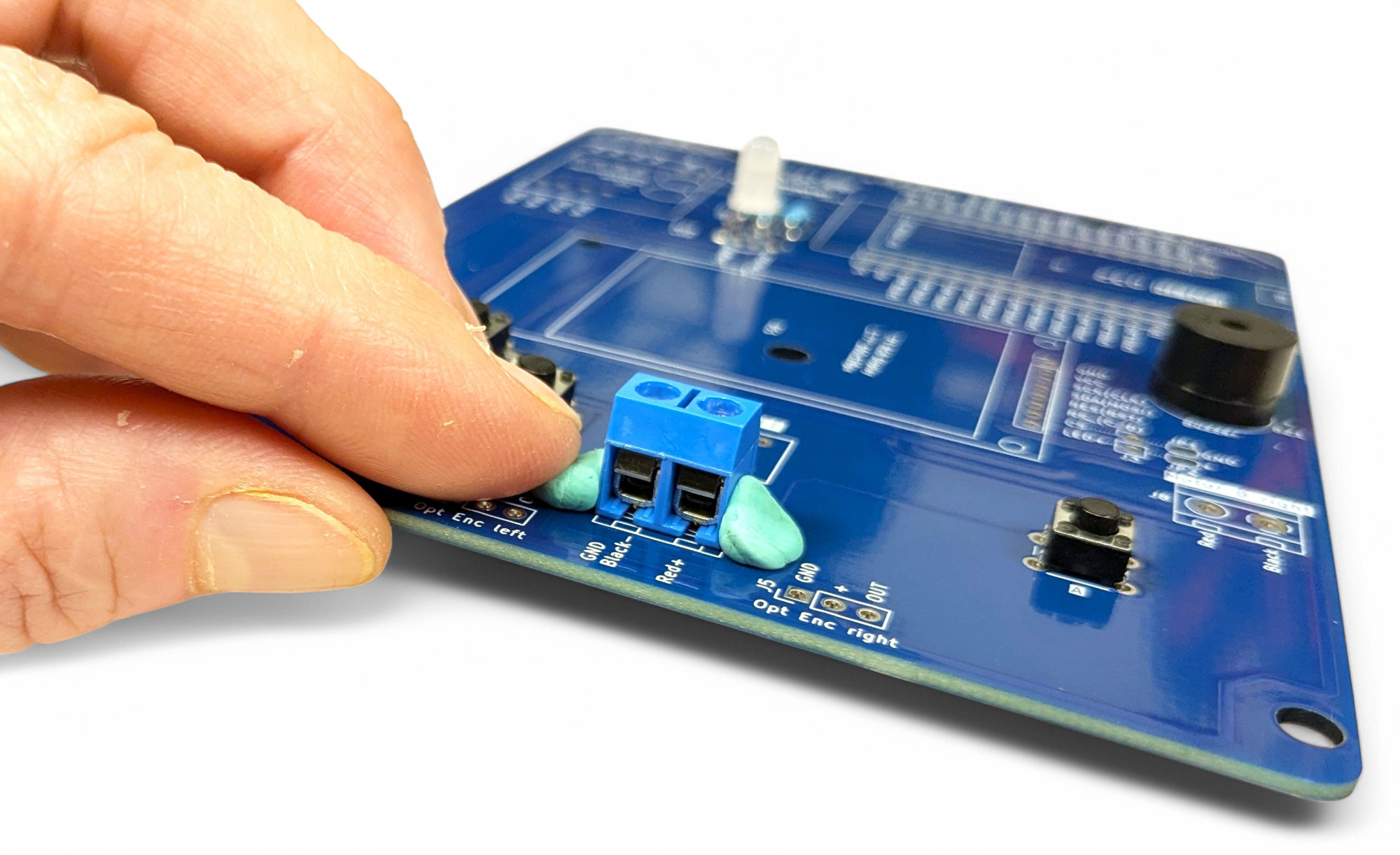
Anschlussklemmen, auch Schraubklemmen genannt, werden verwendet, um Drähte oder Kabel mechanisch und elektrisch sicher mit einer Leiterplatte zu verbinden, ohne dass Lötverbindungen nötig sind.
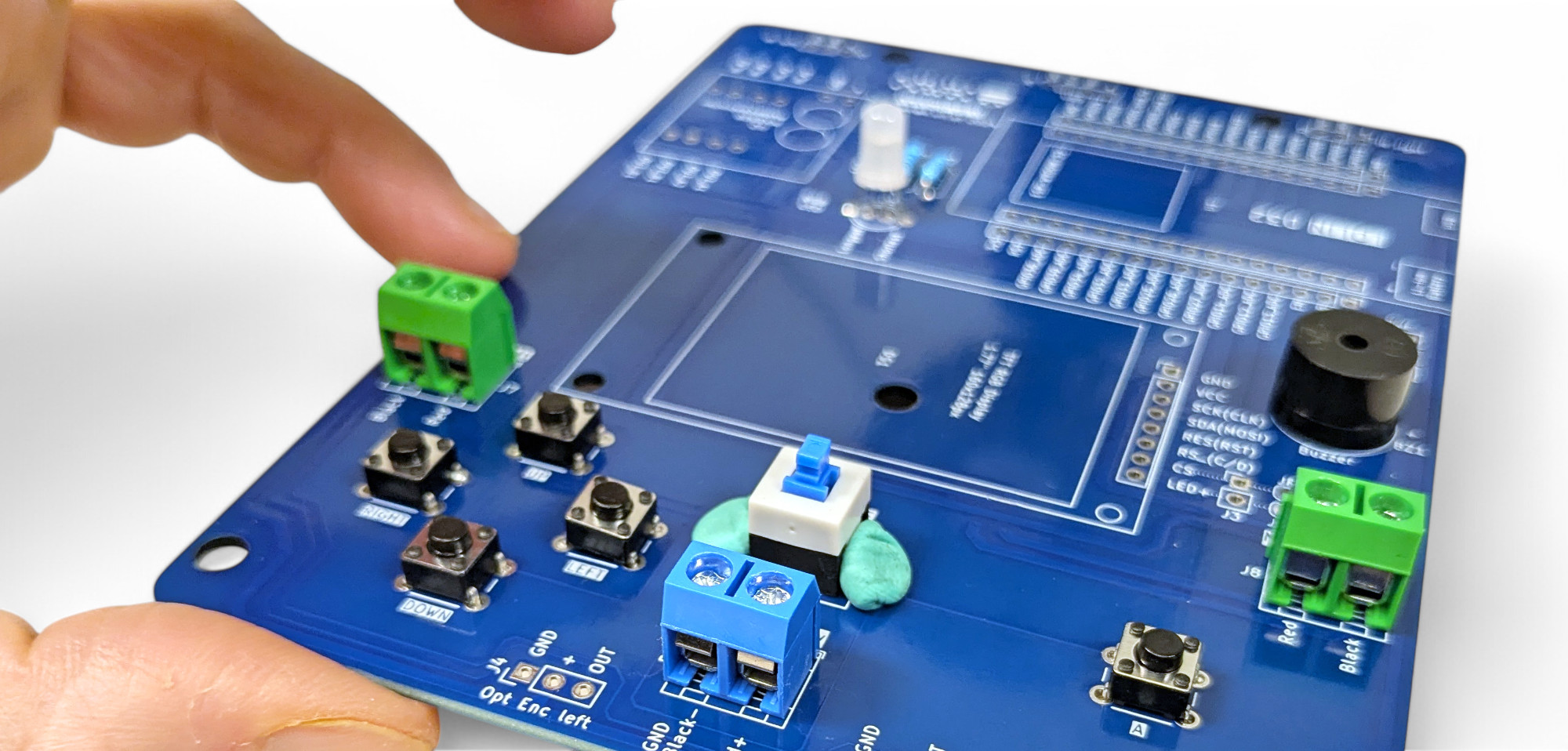
Wir verwenden eine blaue Anschlussklemme in der Mitte für den Batteriehalter, und zwei grüne links und rechts für die Motoren.
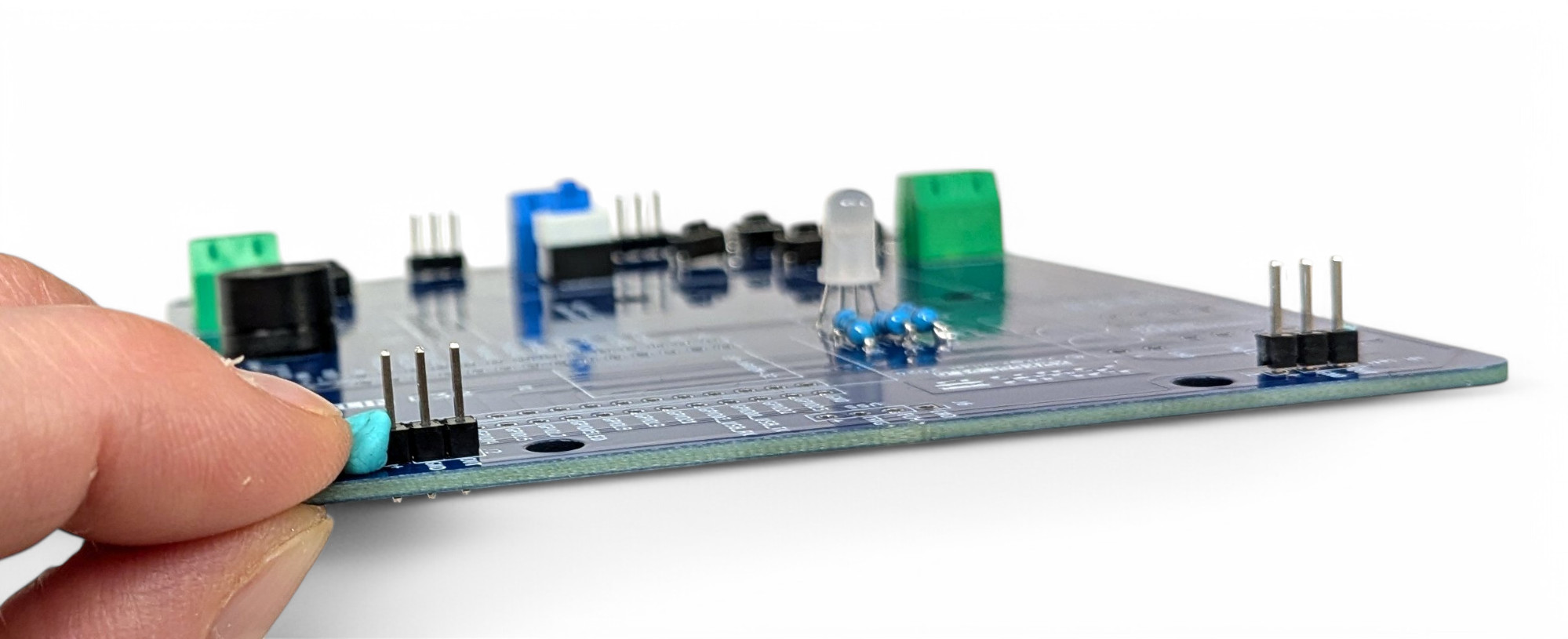
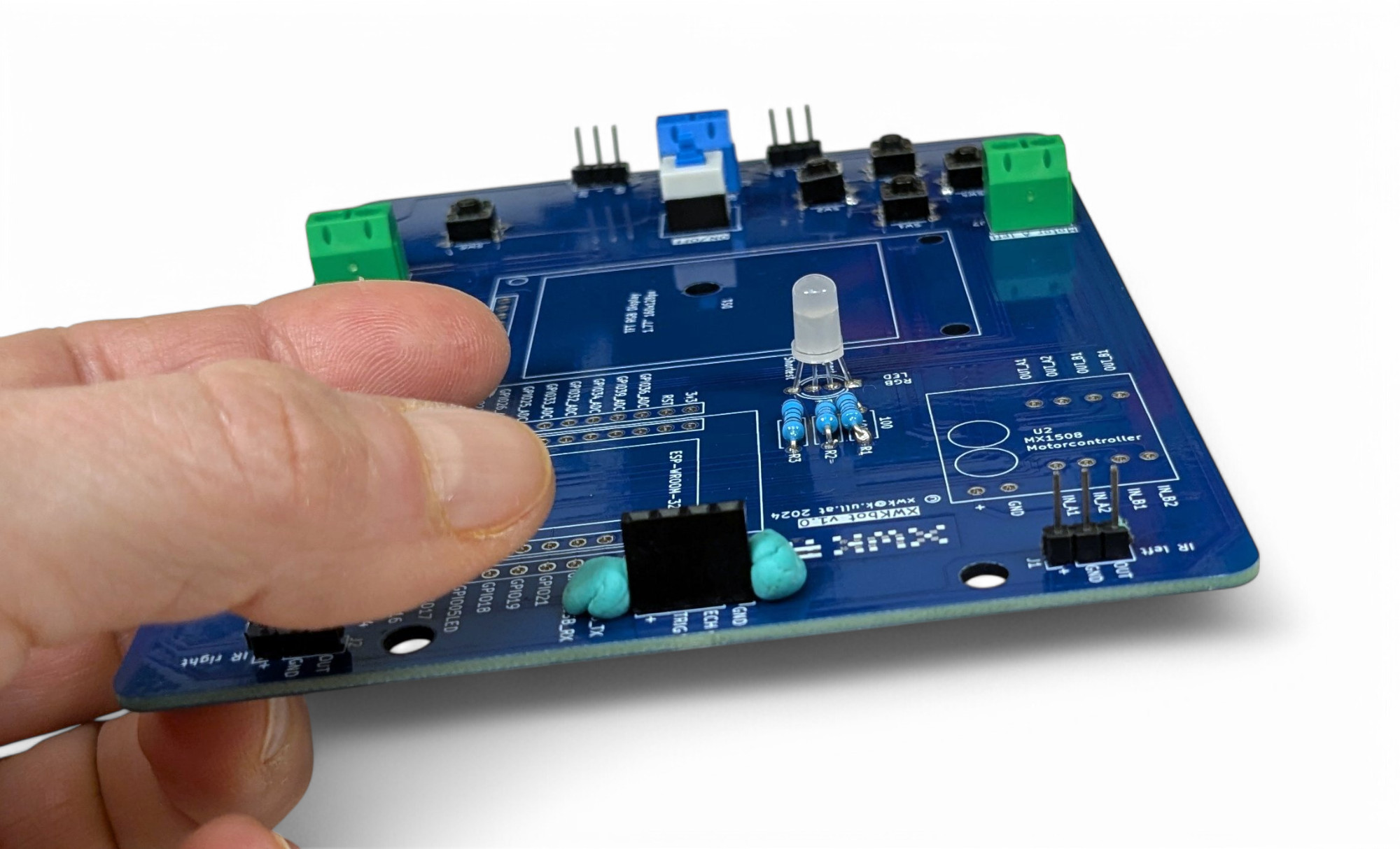
Verwende einen Tropfen Heißkleber oder kleine Kugeln klebende Knetmasse (Tac-It, Maniküre) damit sie nicht beim Umdrehen von der Platine fallen:
TODO: grüne einlöten
Gleich neben der blauen Anschlussklemme löten wir nun den Ein-Ausschalter ein.
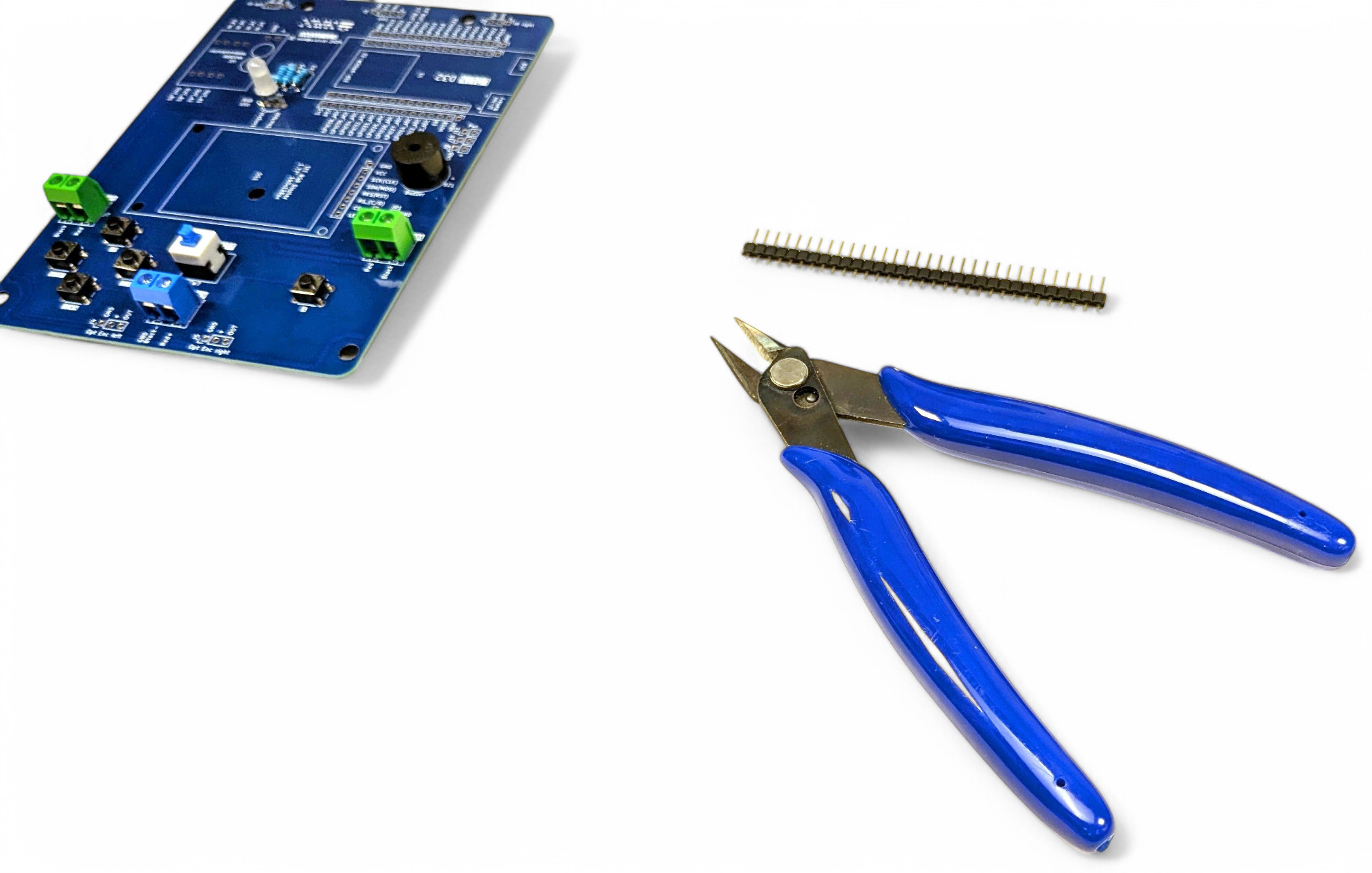
Für die Infrarot-Lichtsensoren benötigen wir zwei männliche Stiftleisten mit je drei Stiften. Nimm einen Seitenschneider und zwicke dei benötigte Länge von der langen Leiste ab.
TODO: Foto 2x3
Suche dann oben auf der Platine die passenden Stellen “J1” und “J2” bezeichnet mit “IR” (Infrarot). Verwende wieder Knetgummi oder Heißkleber um das Bauteil zu fixieren. Dann wie gewohnt Platine umdrehen und festlöten.
Für den Ultraschallsensor benötigen wir eine weibliche Buchsenleiste mit 4 Kontakten. Finde “J6” oben in der Mitte der Platine und löte den Anschluss ein:
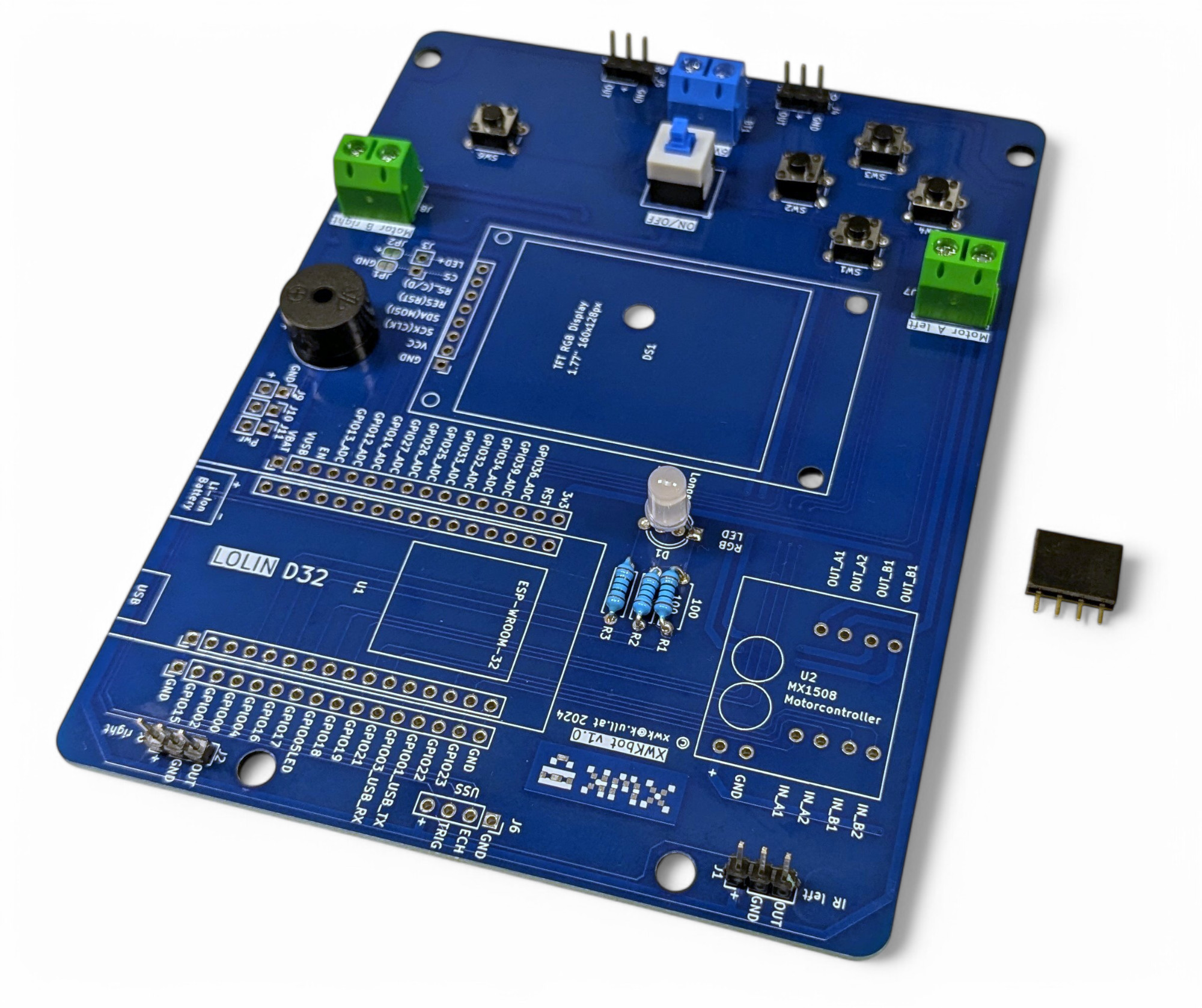
Auch unser kleiner Bildschirm benötigt eine weibliche Buchsenleiste, aber diesmal mit 8 Kontakten. Suche die richtige Stelle für den Display-Anschluss in der Mitte der Platine:
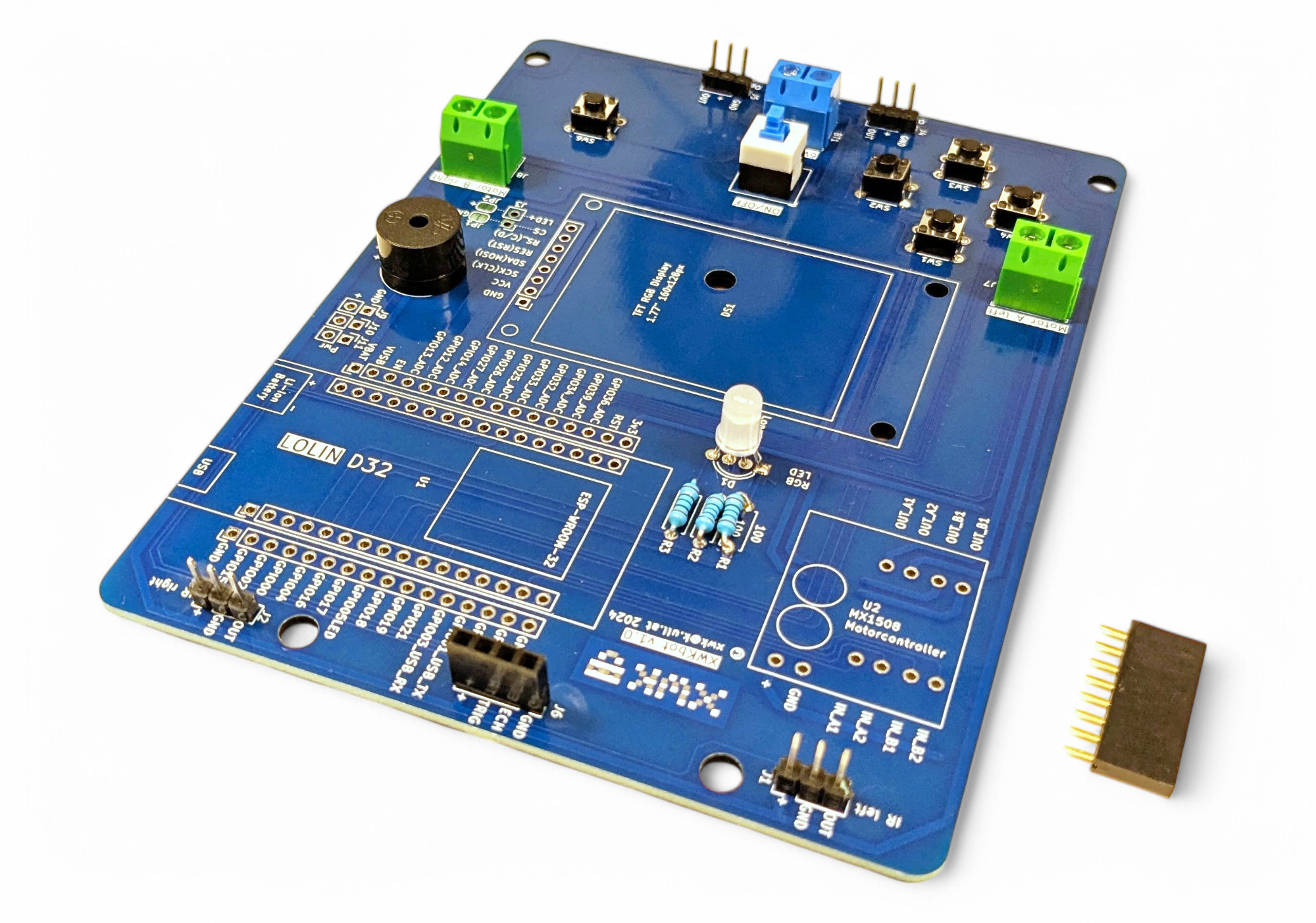
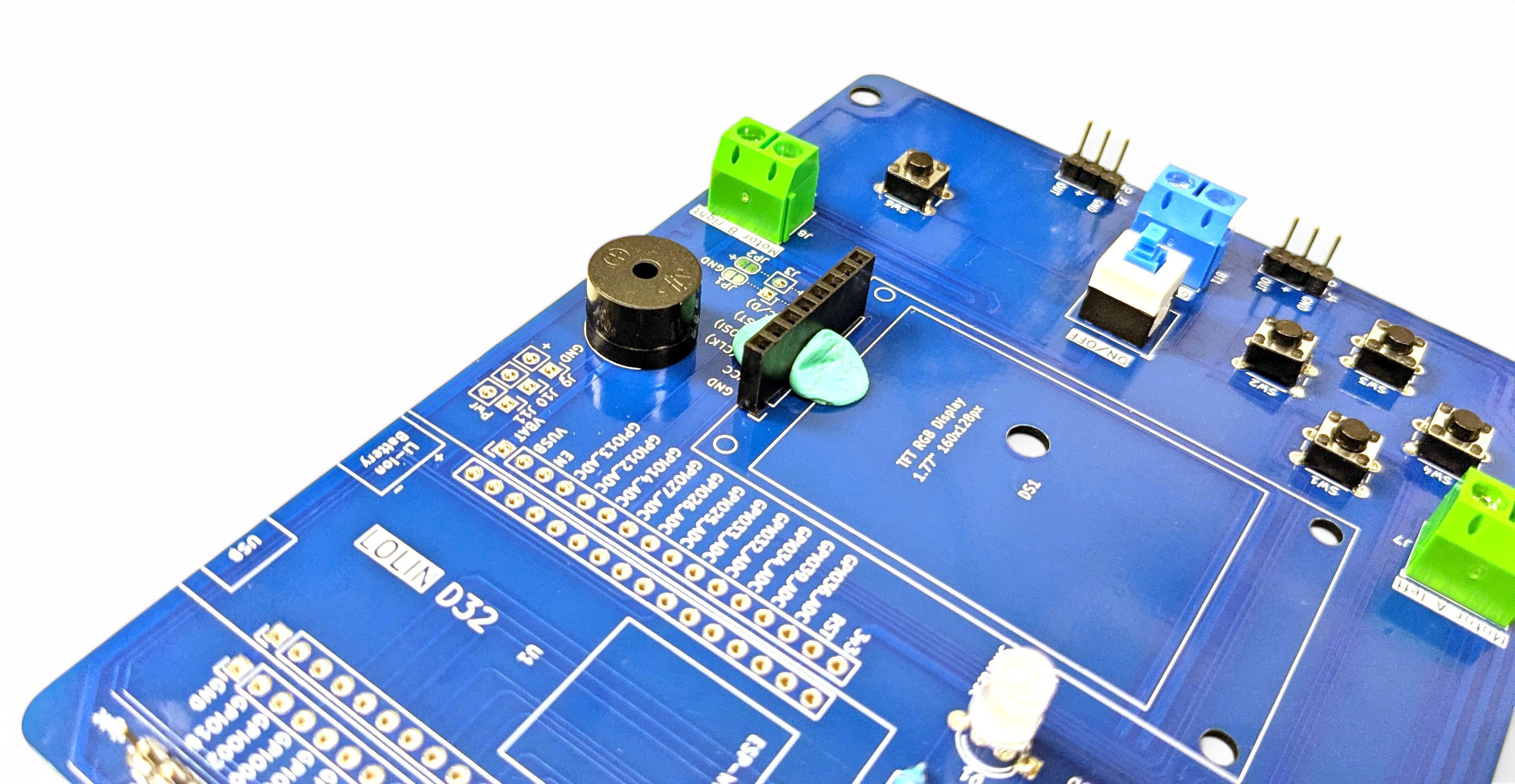
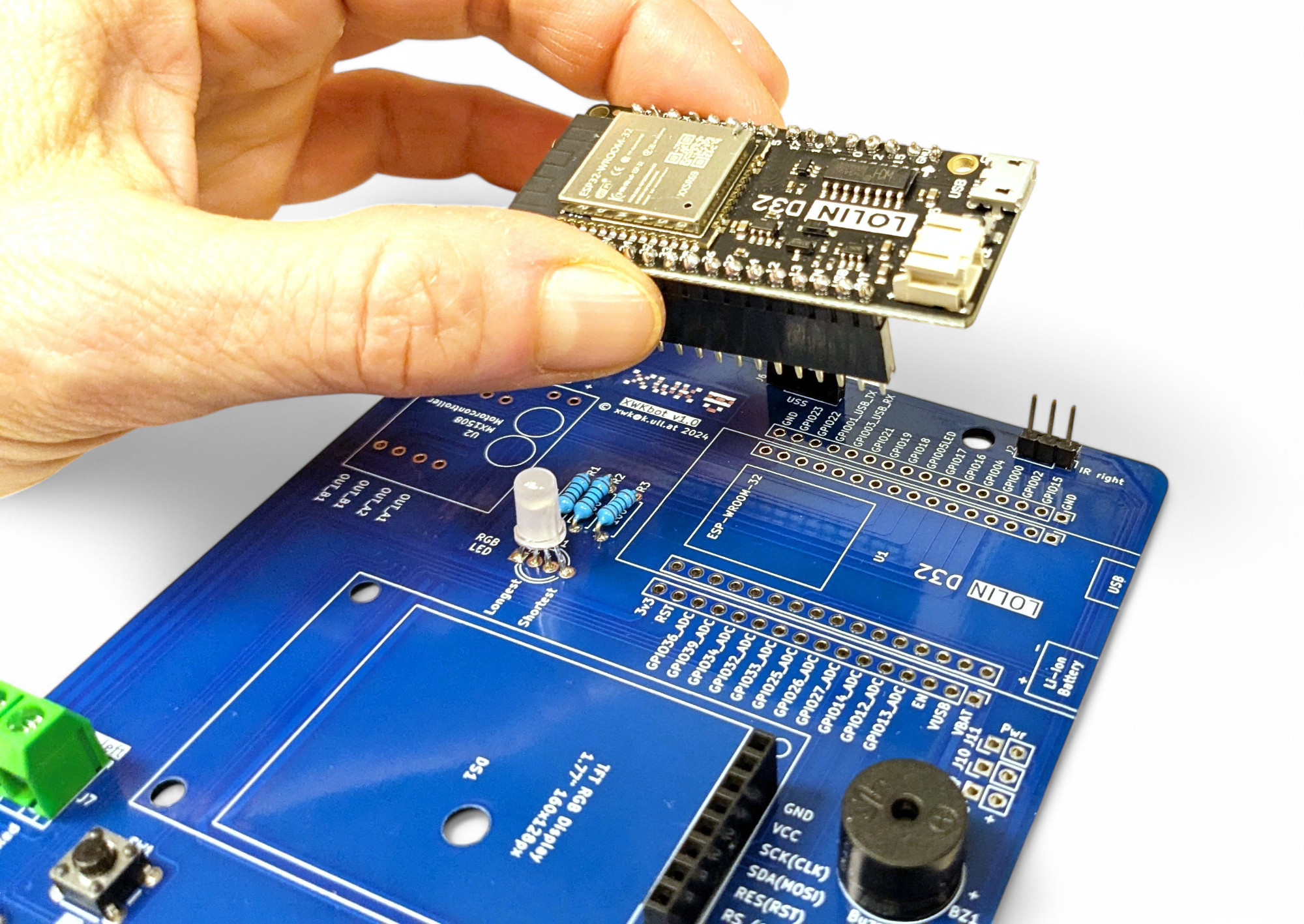
Die verbleibenden weiblichen, langen Buchsenleisten benötigen wir für den Anschluss des ESP-Microcontrollers “LOLIN D32”. Am besten du steckst die Buchsenleisten direkt am Microcontroller an, und dann in die Platine:
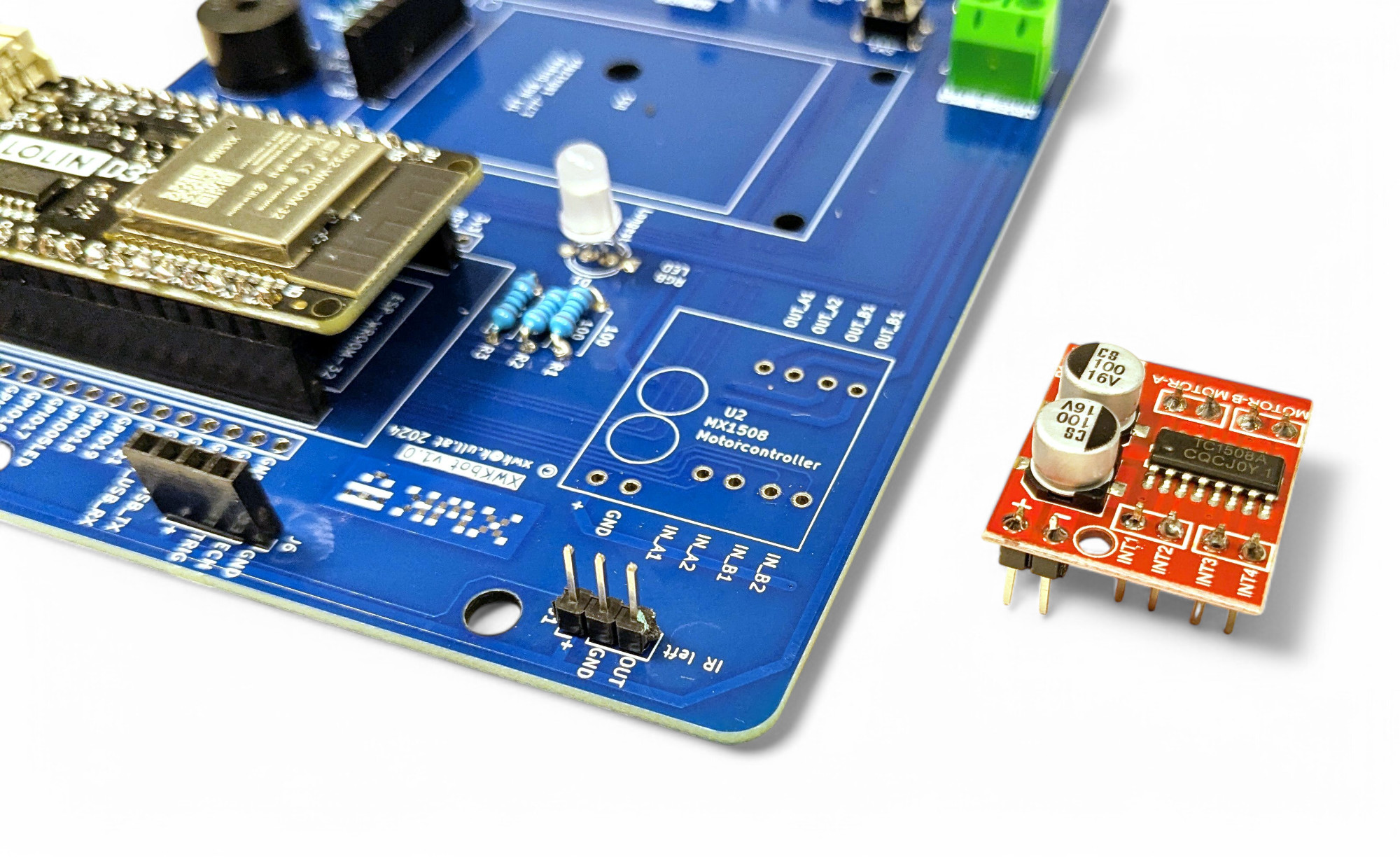
Zuletzt löten wir noch den Motor-Controller ein. Er wird benötigt um die Motoren vom XWK-Bot anzusteuern:
Bravo gut gemacht!
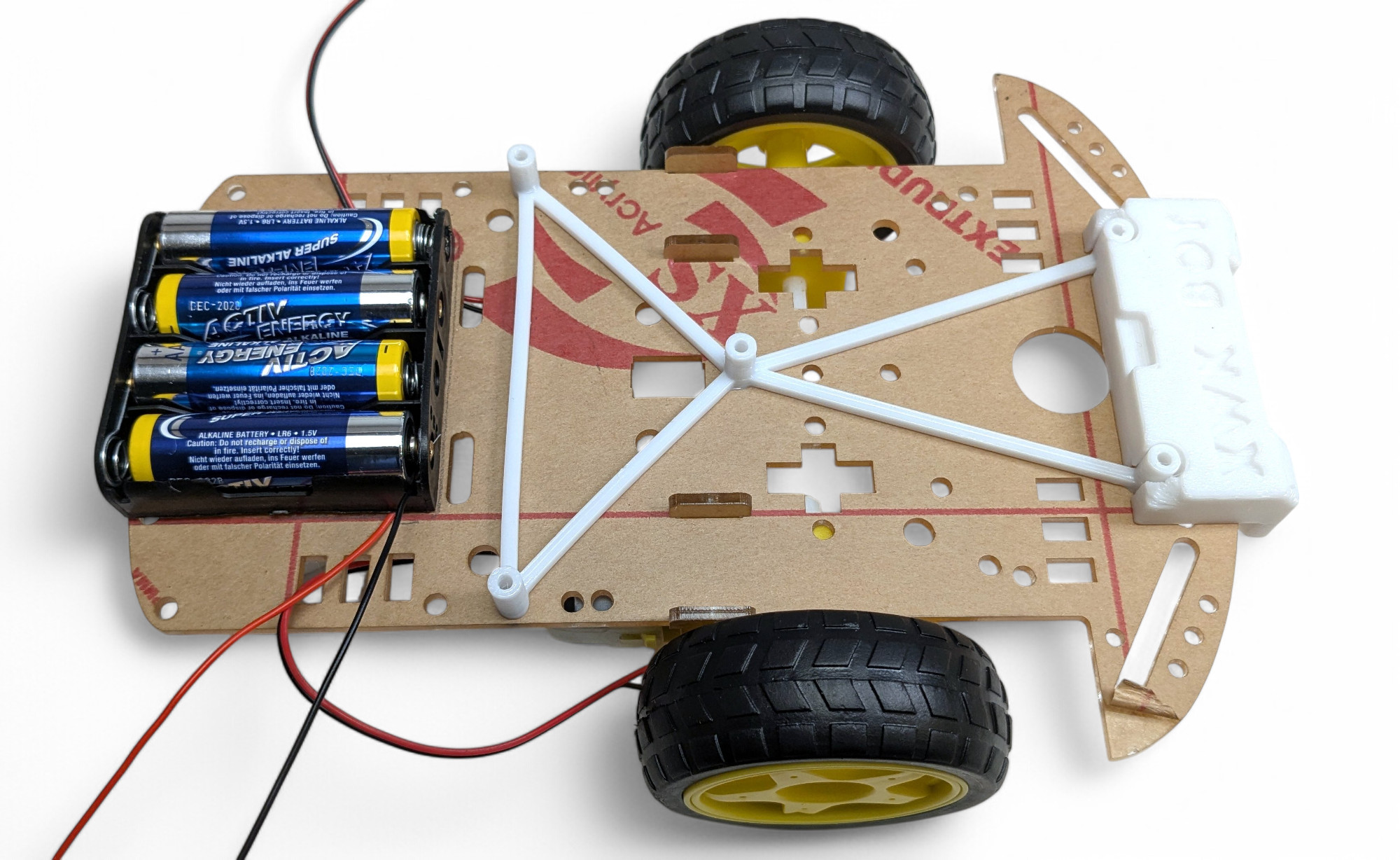
Jetzt bauen wir den Roboter fertig zusammen. Drehe den Bot um und fädle die Motor-Kabel auf die Oberseite:
Suche nun den 3D-gedruckten Platinen-Abstandhalter und befestige ihn mit 5 Schrauben.
Schraube zuerst die 5 Schrauben nur locker ein, dann ziehe sie fest:
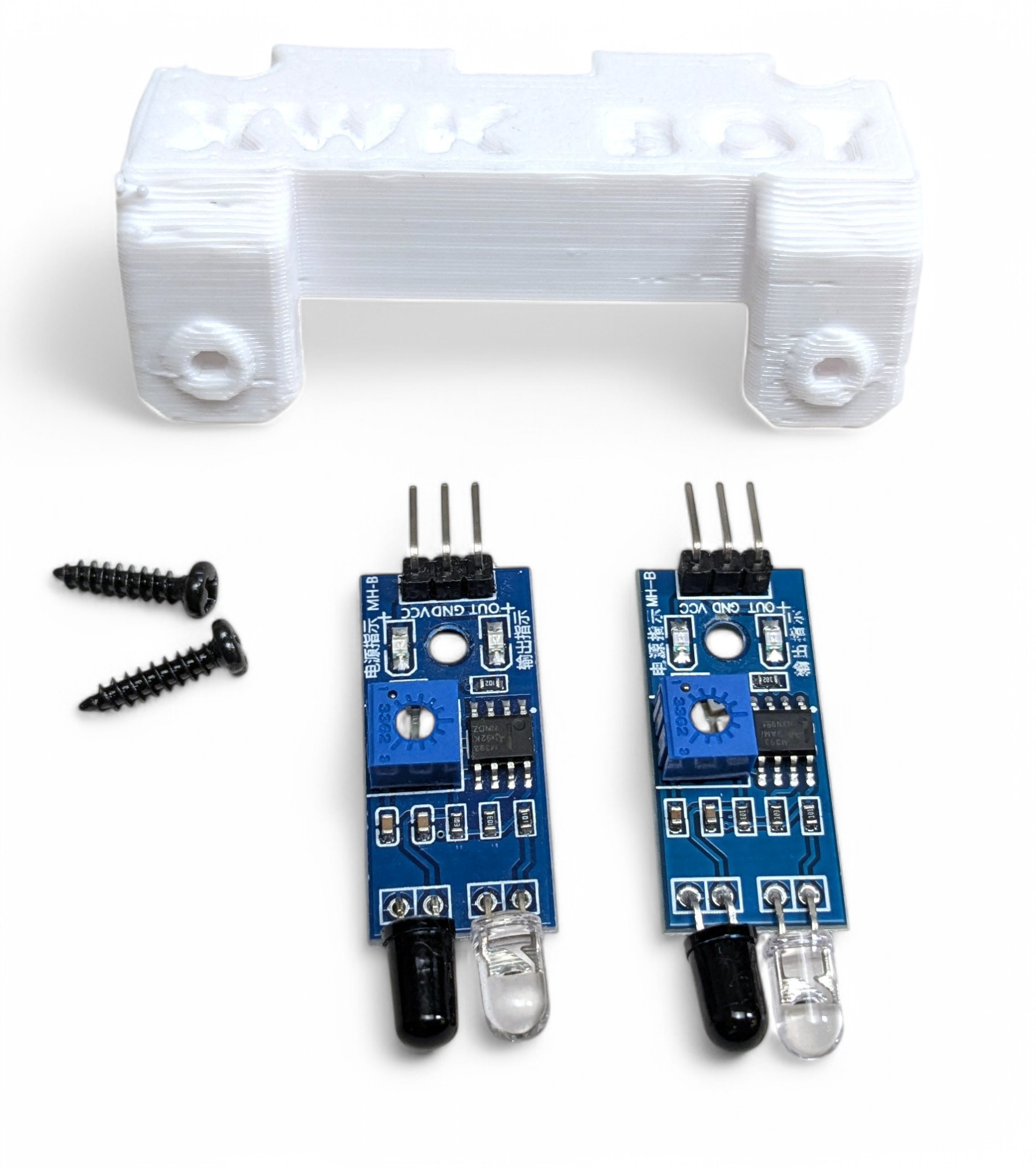
Schraube die beiden Infrarot-Sensoren auf die 3D-gedruckte Halterung:
Lege nun die Halterung für die Infrarot-Sensoren auf die Grundplatte. Es passt wie ein Puzzle zusammen:
Schraube den Abstandshalter für das Display auf die Platine:
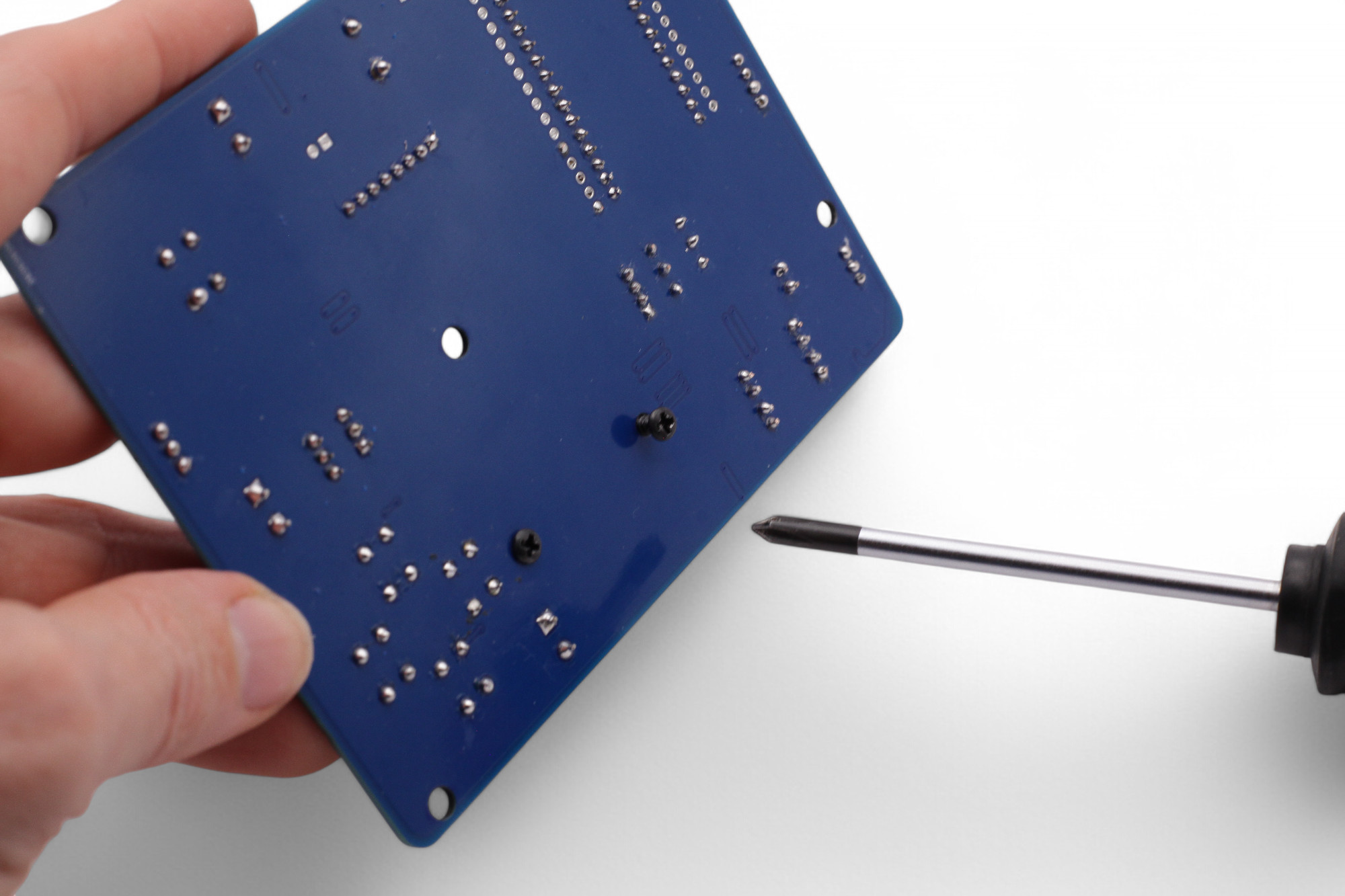
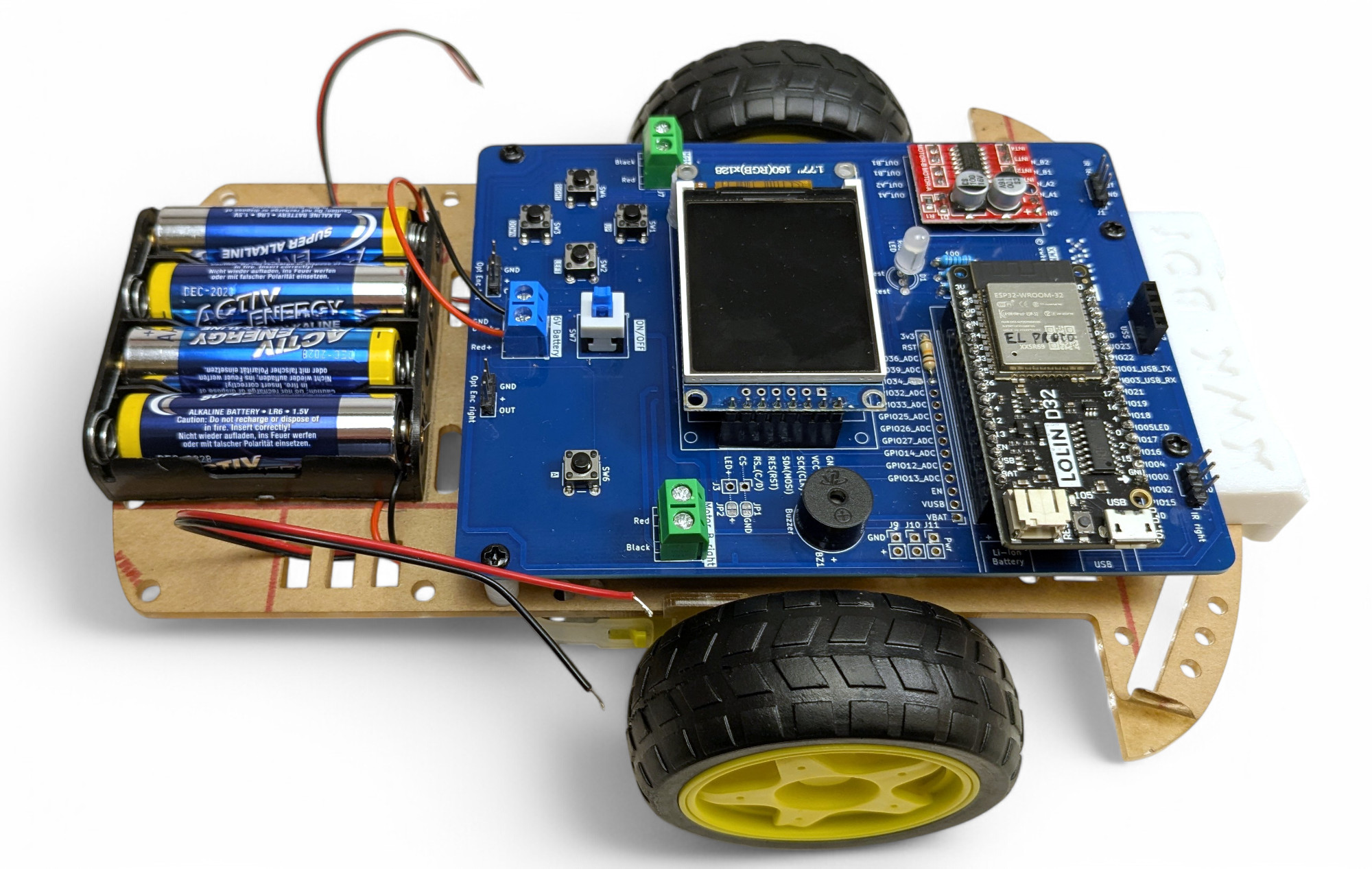
Befestige nun die Platine auf die Grundplatte. Zuerst die Schraube in der Mitte, dann an den vier Ecken. Schraube wieder zuerst die 5 Schrauben nur locker ein, dann ziehe sie alle fest:
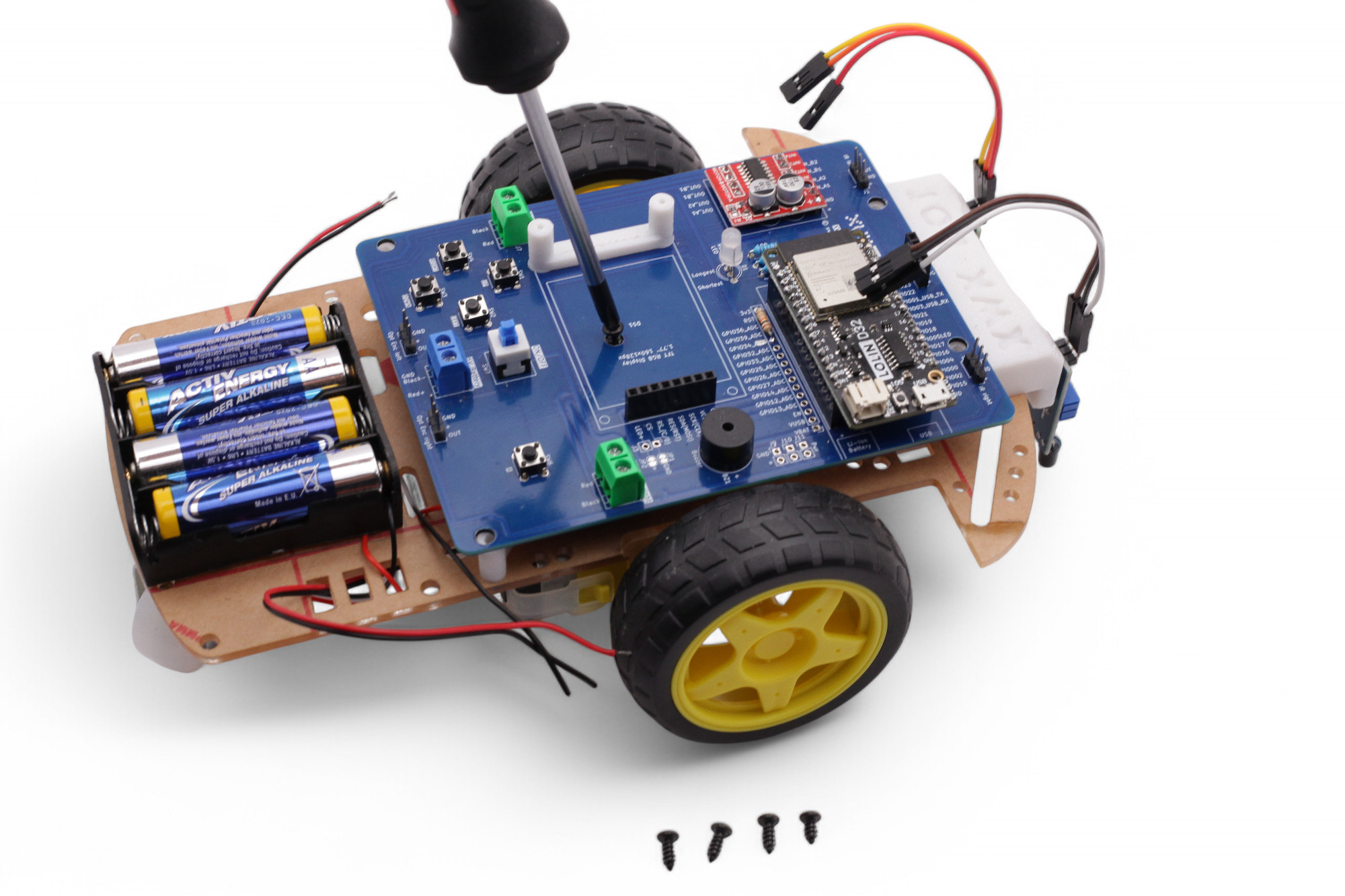
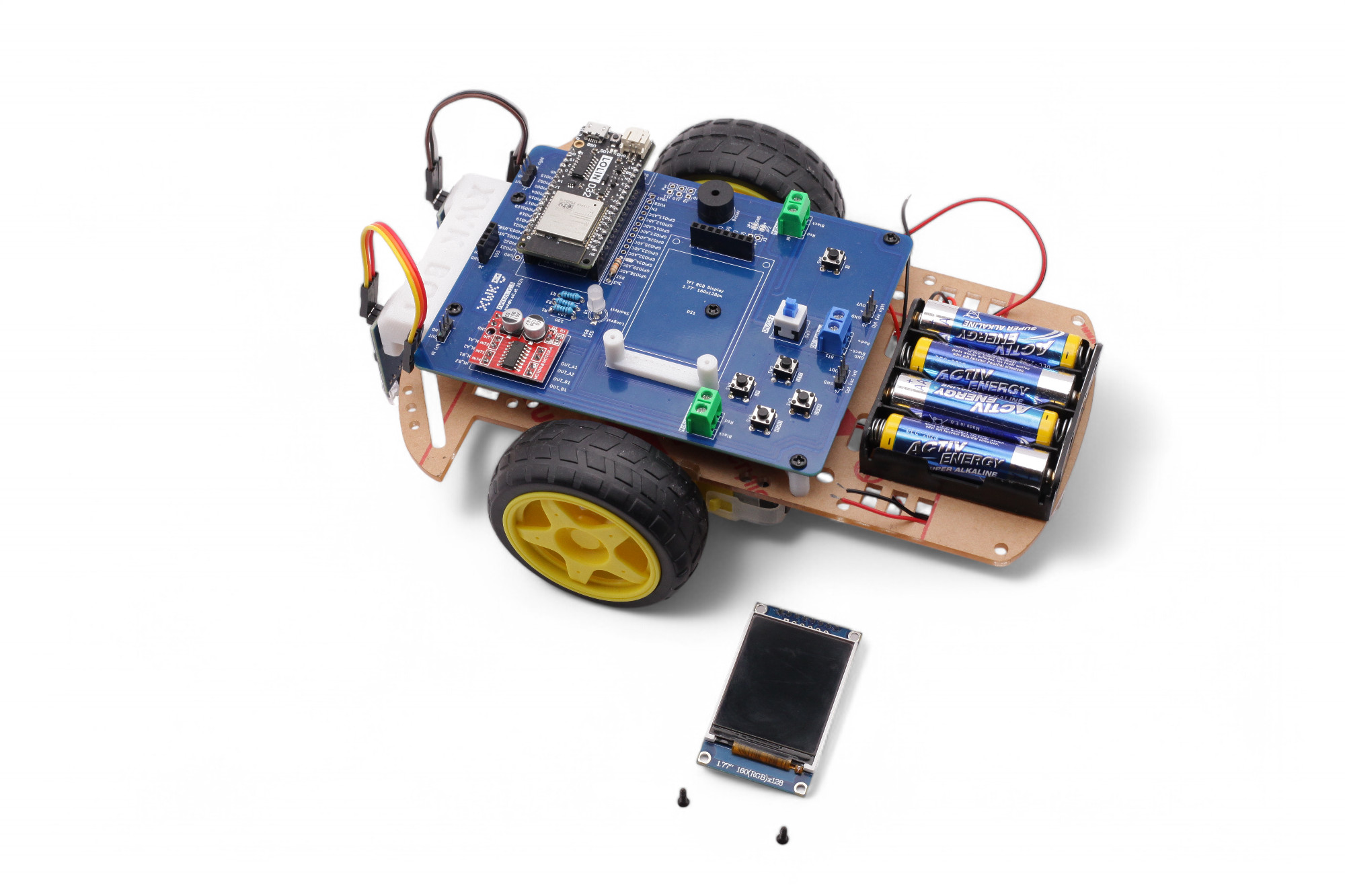
Stecke das Display auf und befestige es mit zwei kleinen Schrauben:
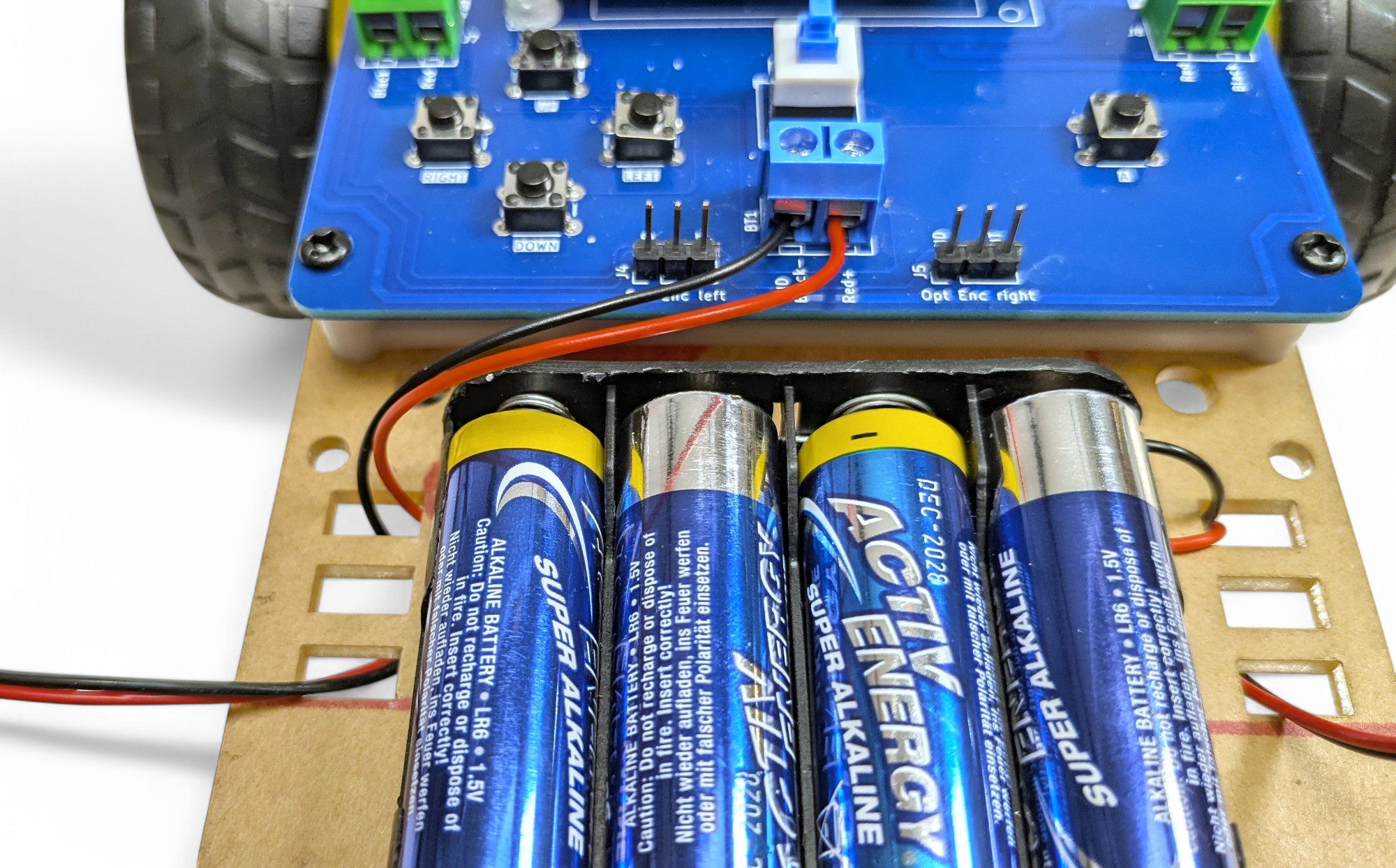
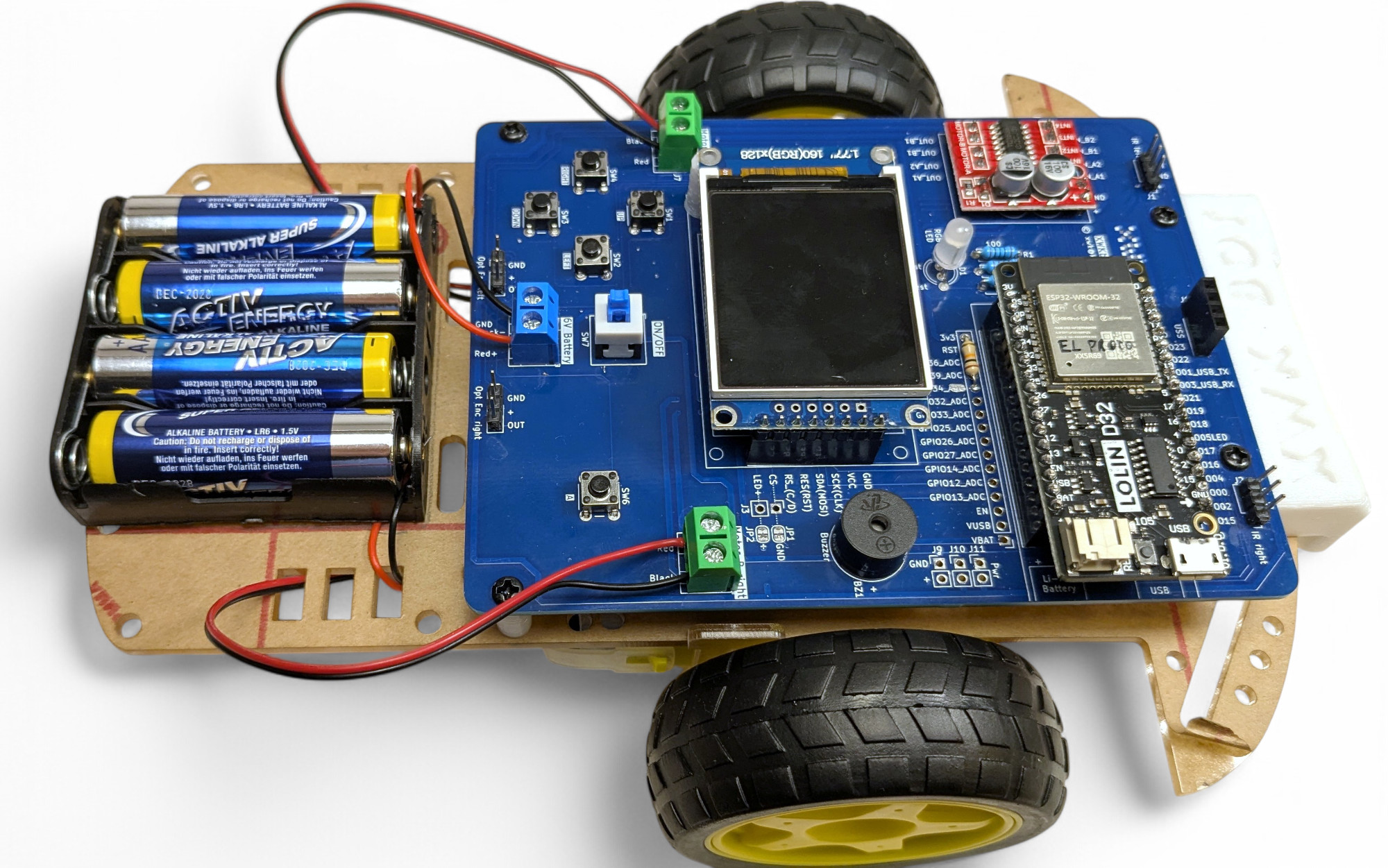
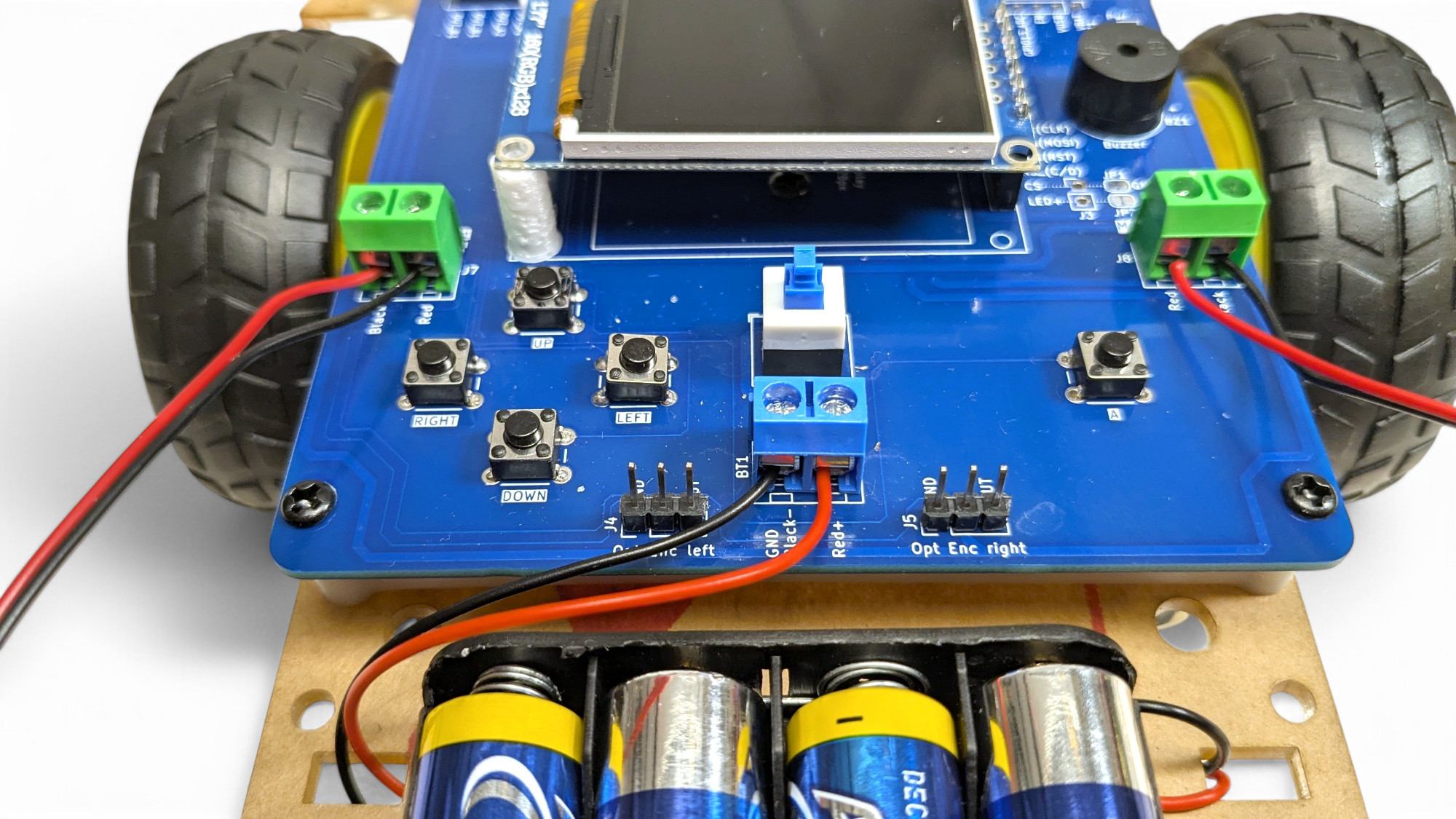
Das Kabel des Batteriehalters ist etwas zu lang. Versuche es gut zu verlegen. Z.B: fädle das Kabel auf die Unterseite und auf der anderen Seite wieder herauf. Nun verbinden wir das Anschlusskabel der Batterie mit der blauen Anschlussklemme.
Achtung unbedingt auf die Polarität! Rot/Red = “+ (Pluspol) und Schwarz/Black =”- (Minuspol)! Wenn du das vertauscht kannst du den Roboter zerstören!
Stecke die blanken Kabelenden in die Anschlussklemme und schraube sie fest.
Wiederhole den selben Vorgang für die Anschlusskabel der Motoren:
(Linke Seite verkehrt herum: Rotes Kabel zu BLACK, Schwarzes zu RED)
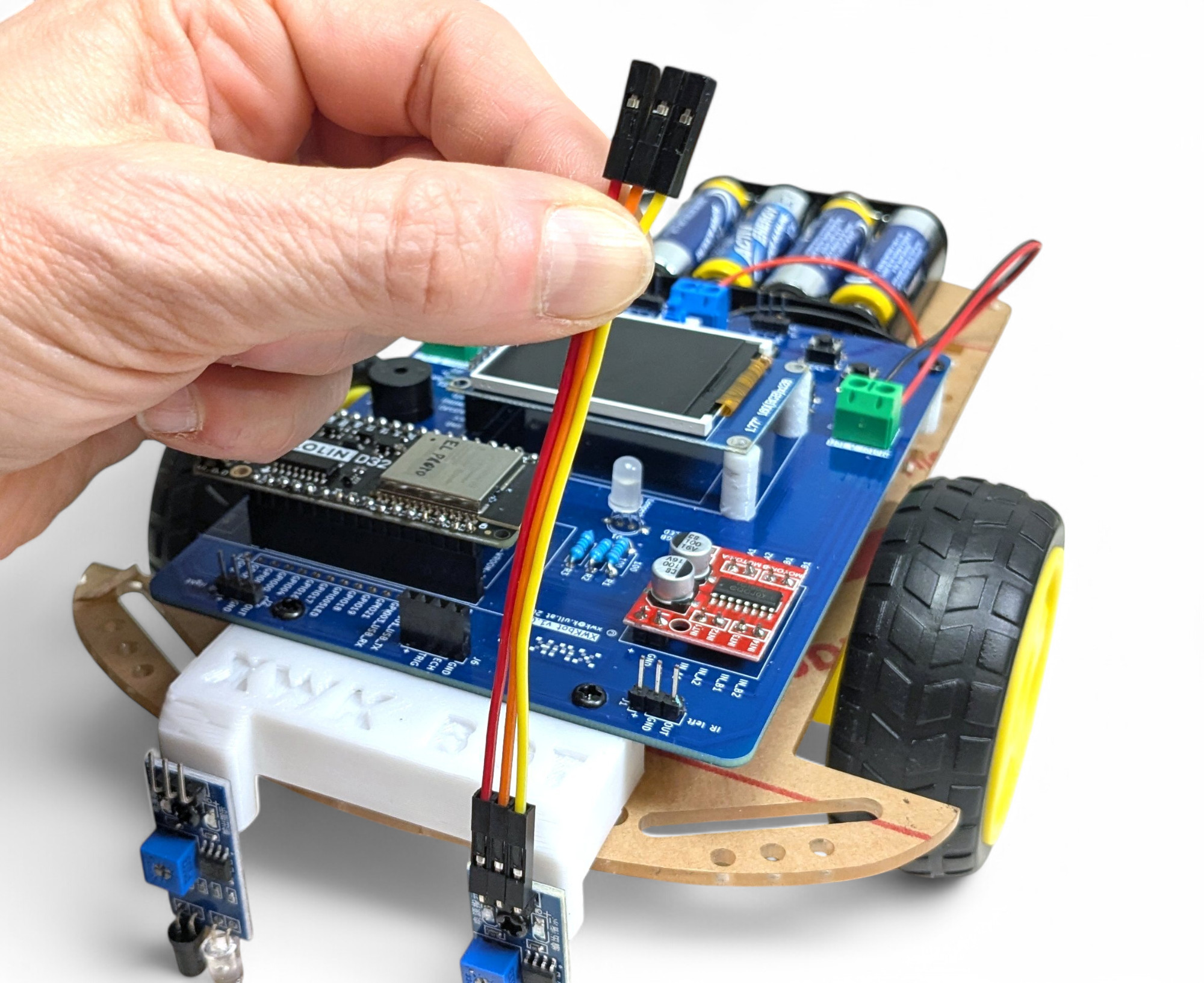
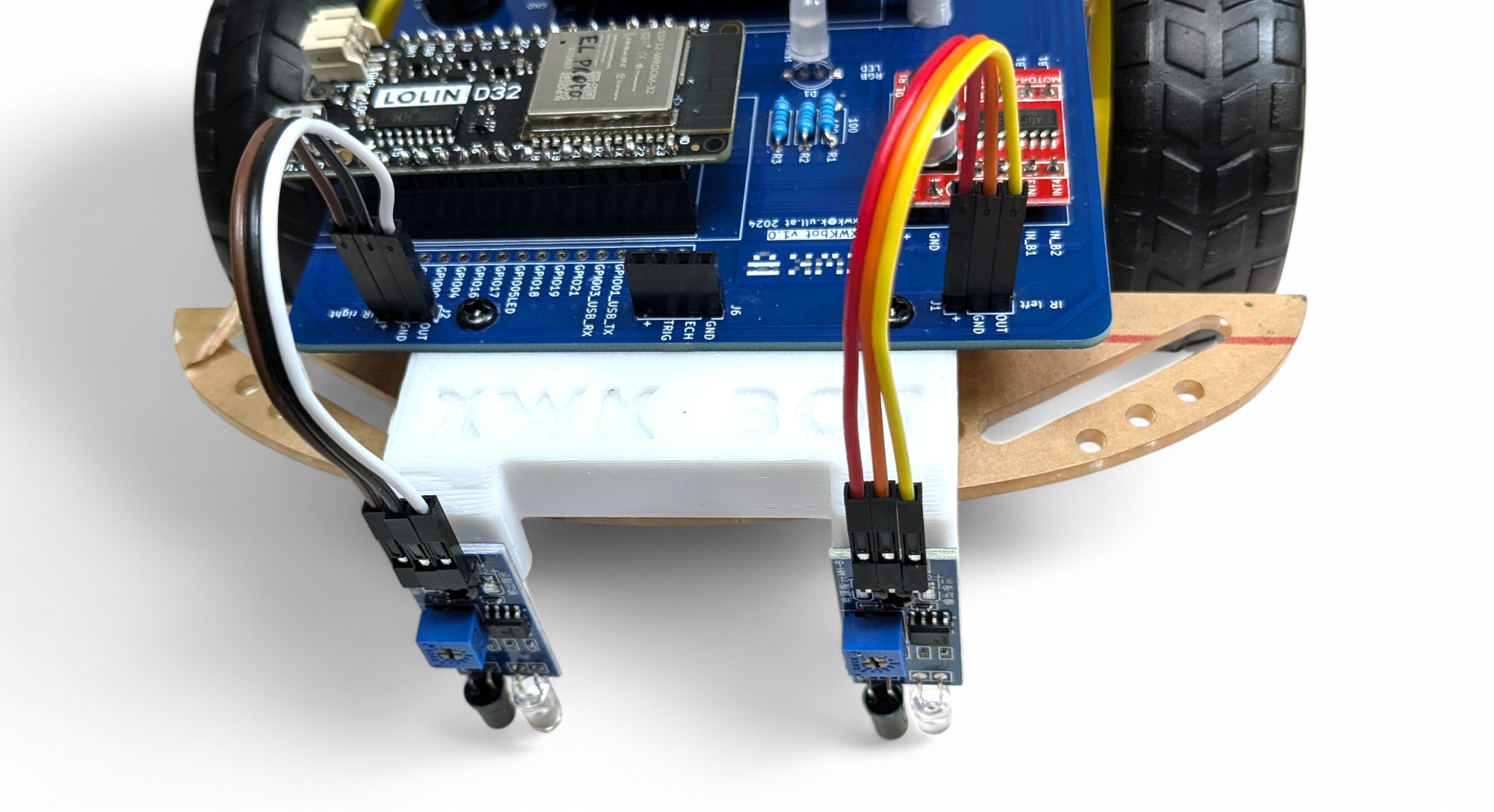
Nun schließen wir die Infrarot-Sensoren an. Wir benötigen zwei Kabeln mit je drei Leitungen. Trennen dazu jeweils drei Leitungen vom “Regenbogen”-Flachbandkabel ab.
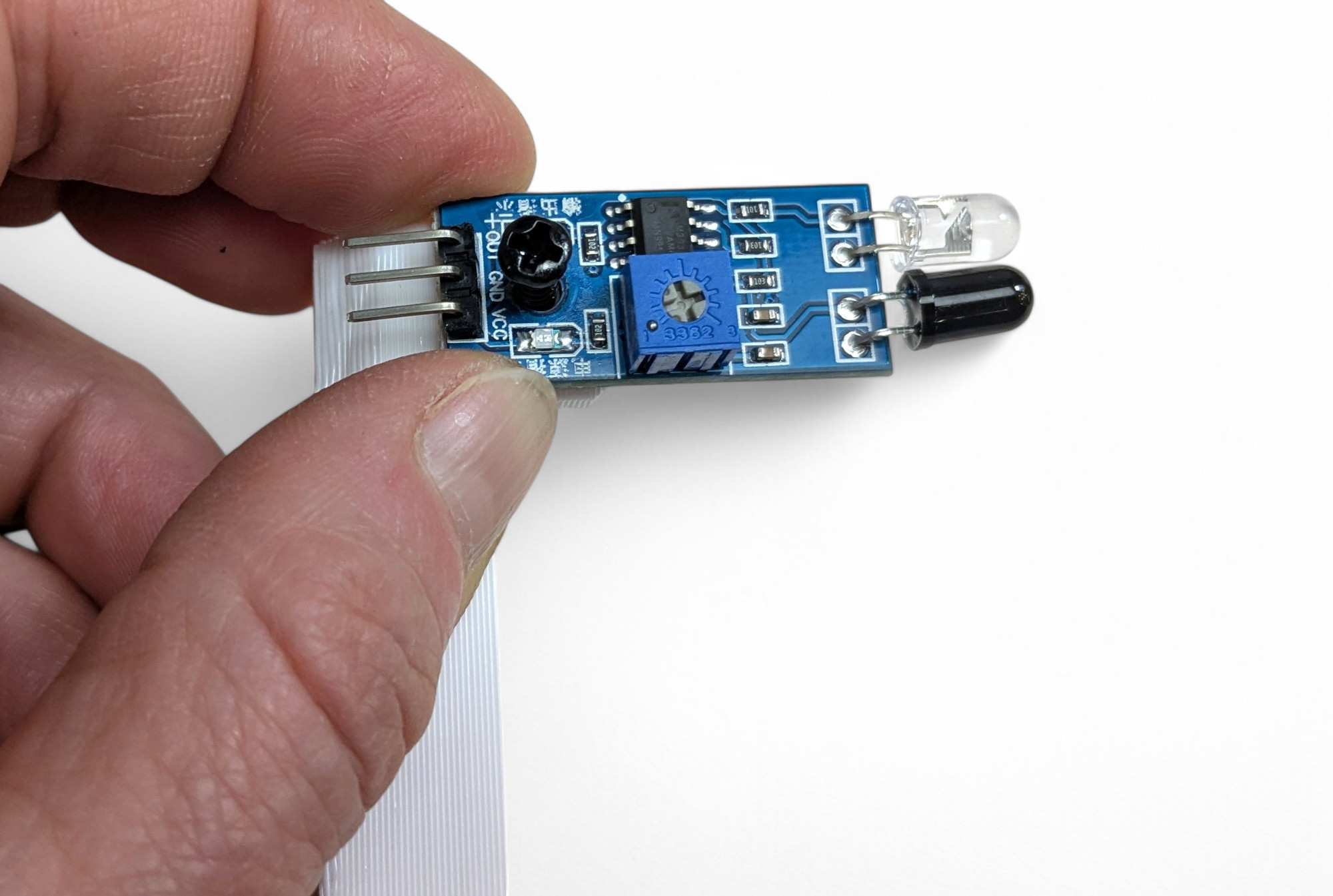
Stecke dann ein Ende an den Sensoren, und das andere Ende an der Platine an.
Achtung unbedingt auf die Polarität! Du Anschlüsse dürfen auf keinen Fall verdreht / vertauscht sein, sonst wird der Sensor zerstört!
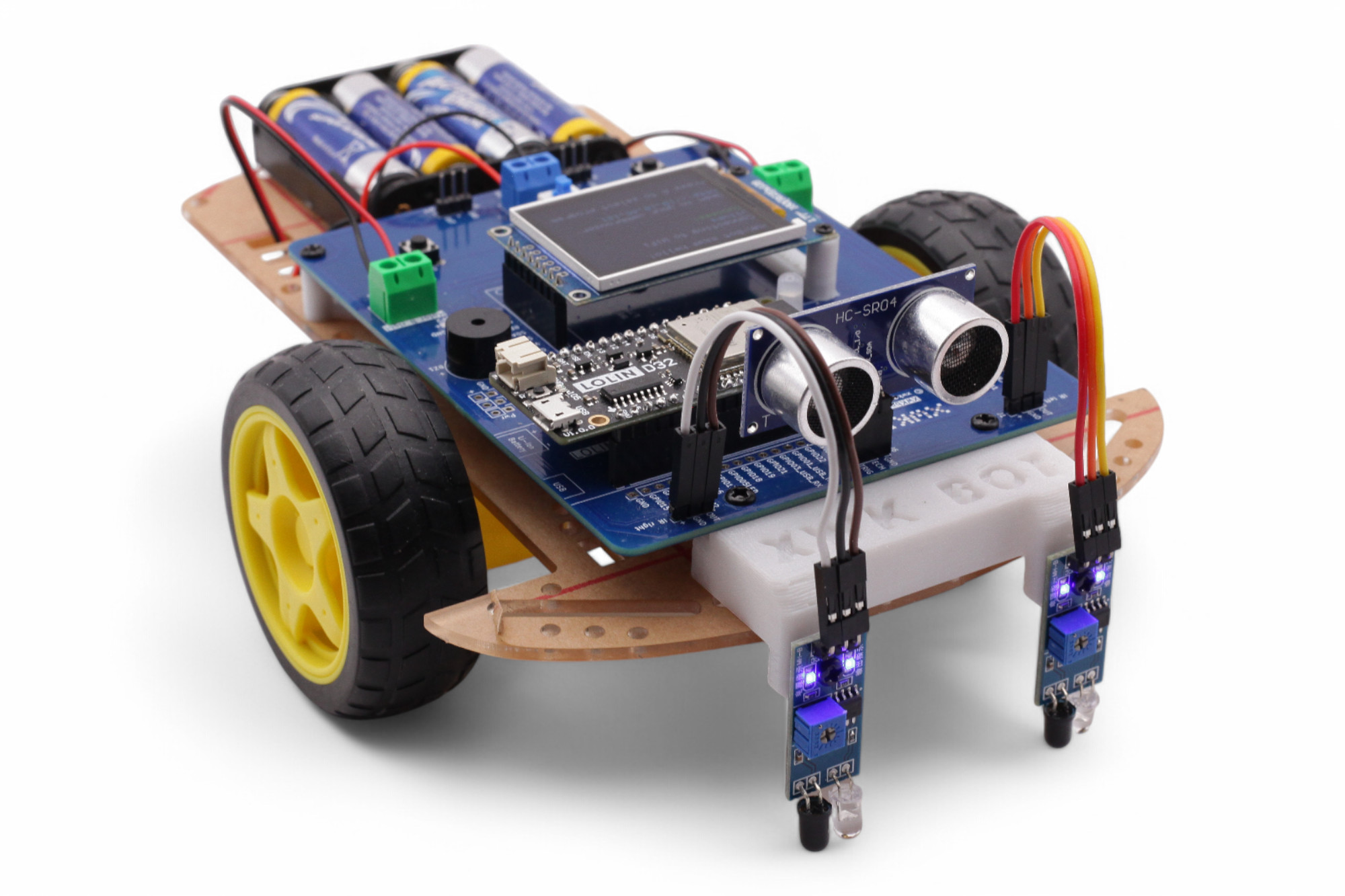
Jetzt noch den Ultraschall-Sensor aufstecken:
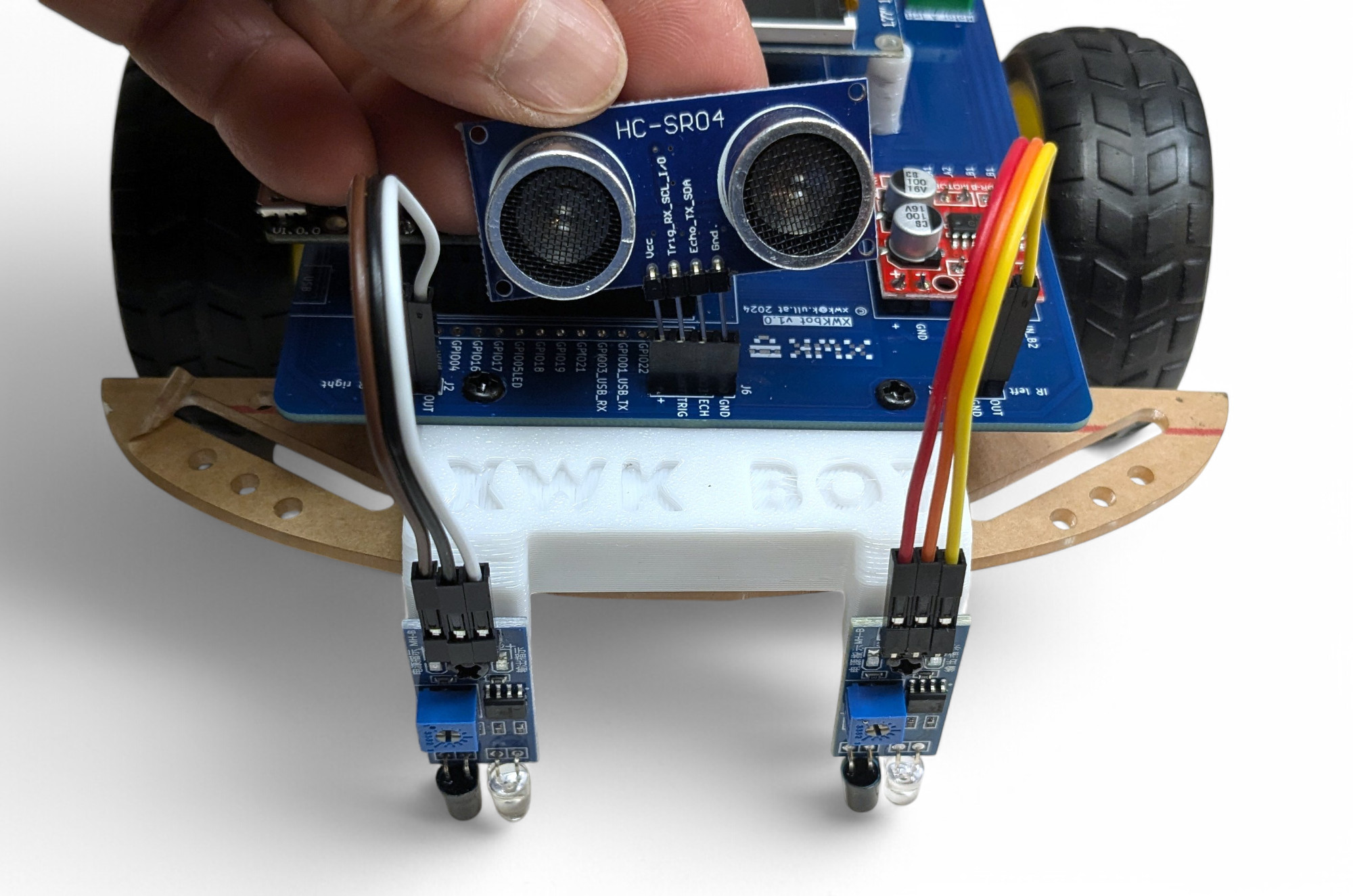
Mit dem Ultraschall-Sensor kann der Bot die Entfernung zu Gegenständen erkennen. Ein Ultraschallsensor funktioniert wie das Gehör einer Fledermaus. Er sendet so hohe Töne, dass Menschen sie nicht mehr höhren können. Dann horcht der Sensor wie schnell das Echo zurückkommt, um so die Entfernung zu Objekten zu berechnen. Fledermäuse nutzen genau dieses Prinzip, um in der Dunkelheit zu “sehen” und Hindernissen auszuweichen oder Beute zu finden.
Ein Infrarot-Lichtsensor funktioniert wie ein Auge, dass nur hell und dunkel unterscheiden kann. Allerdings für Infrarot-Strahlung und nicht für sichtbares Licht. Dieses “Auge” ist die dunkle LED auf dem Sensor. Der Sensor hat auch eine “Taschenlampe” eingebaut die Infrarot-Licht ausstrahlt. Das ist die durchsichtige LED auf dem Sensor.
Beide Infrarot-Sensoren müssen eingestellt werden, damit sie gut den Unterschied zwischen hell und dunkel erkennen. Man nennt das Kalibirieren. Das geht so:
Bravo, du hast es fast geschafft! Jetzt testen wir noch ob alle Funktionen des XWK-Bots richtig funktionieren.
Dafür hat der Bot ein Testprogramm eingebaut. So kannst du es starten:
Hier eine kurze Erklärung der Tests. Wenn etwas nicht funktioniert springe zum Kapitel “Fehlerbehebung”.
Bewege den Bot über helle und dunkle Untergründe. Die Ausgabe auf dem Bildschirm sollte immer richtig “bright” (=hell) oder “dark” (= dunkel) anzeigen.
Drücke “A” um zum nächsten Test zu gehen.
Das Display zeigt dir die Entfernung zum nächsten erkannten Gegenstand an. Bewege den Bot in verschiedene Richtungen und prüfe ob die Entfernungen ungefähr stimmen. Der Sensor kann maximal 3m weit “sehen”.
Drücke “A” um zum nächsten Test zu gehen.
Der linke Motor sollte sich ein Stück vorwärts, dann rückwärts drehen. Dann sollte sich der rechte Motor ein Stück vorwärts, dann rückwärts drehen.
Wenn sich ein Motor in die falsche Richtung dreht musst du die Kabel in der zugehörigen Anschlussklemme vertauschen. Starte dann den Test neu und teste ob nun die Richtung passt.
Du solltest einen Ton hören
Du solltest alle Farben sehen: rot, grün, blau, gelb, magenta (pink), cyan (türkis) und weiss.
Drücke alle Tasten in beliebiger Reihenfolge.
Hat alles geklappt? Herzliche Gratulation! Du hast den XWK-BOT erfolgreich aufgebaut!
Ärgere dich nicht zu sehr, es ist völlig normal das Fehler passieren. Eine Super-Power für das Leben ist es, wenn du lernst Fehler systematisch zu finden und zu lernen bzw zu verstehen warum er auftritt.
Hier ein paar generelle Tipps:
Nichts leuchtet, nichts bewegt sich. Teste:
Am besten testest du mit einem Messgerät/Multimeter falls du Zugang zu einem hast. Stelle das Messgerät auf Spannung/Voltage und berühre mit den Mess-Spitzen (schwarz zu schwarz, rot zu rot) die Schrauben der blauen Anschlussklemme. Du solltest einen Wert von 4,5 bis 6 Volt angezeigt bekommen.
Manchmal wurden in der Fabrik die Kabel schlecht am Batteriehalter befestigt. Das lässt sich leider schwer reparieren. Du kannst das reklamieren. Oder du versuchst die Kabel abzuisolieren und die blanken Drähte zwischen Batterie und Halter einzuklemmen.